Is Someone how to use "Find Home"
1、when use “Find Home” is any setting need to do?
2、when i use it ,it move to home localtion but it didn‘t stop 。
3、when find home how can i set the xyz point to 0 ,because when i use it always the Negative
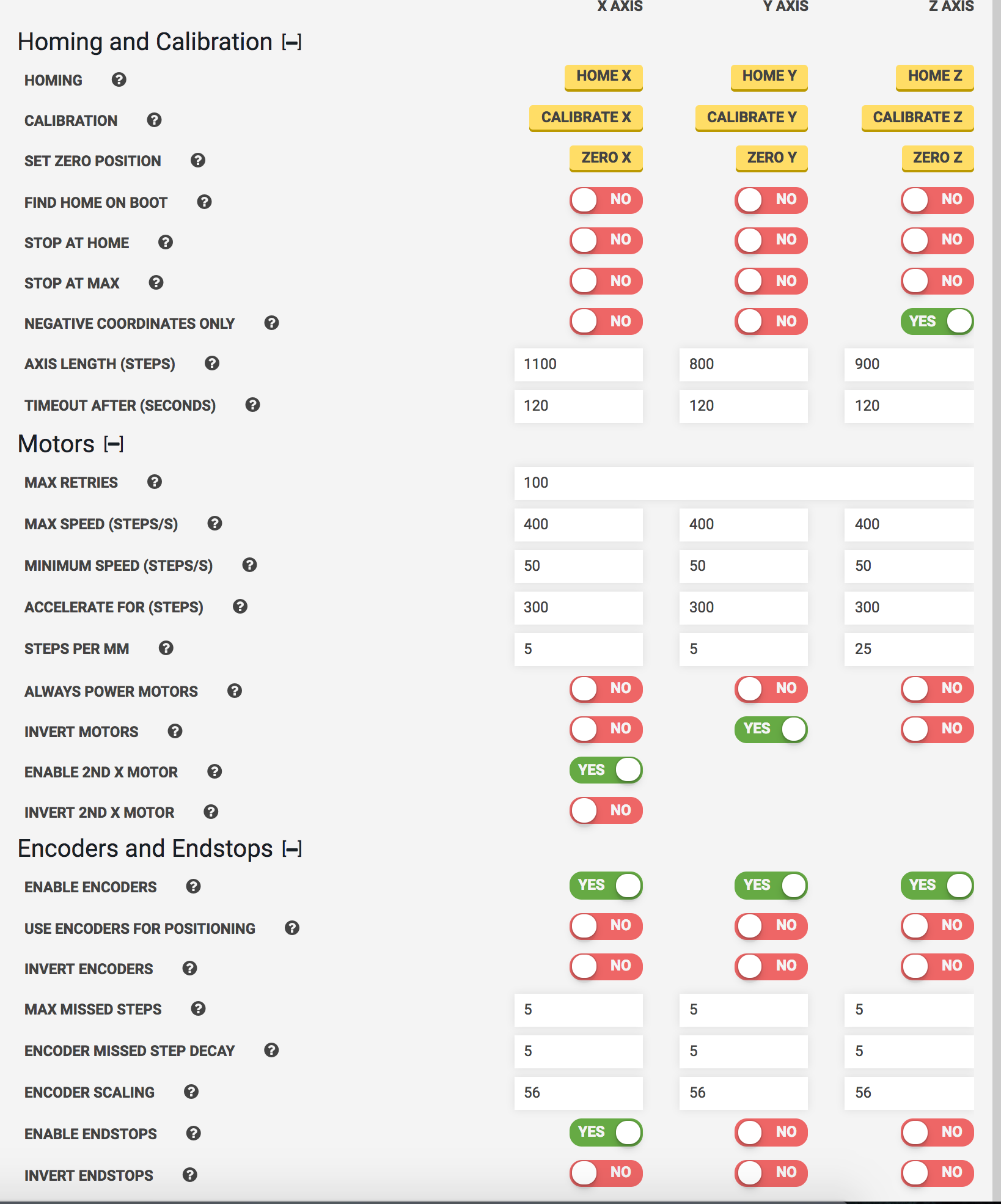
Do you have encoders or end-stops enabled? Do the homing buttons in the homing and calibration section of the hardware widget on the device page work to find home?
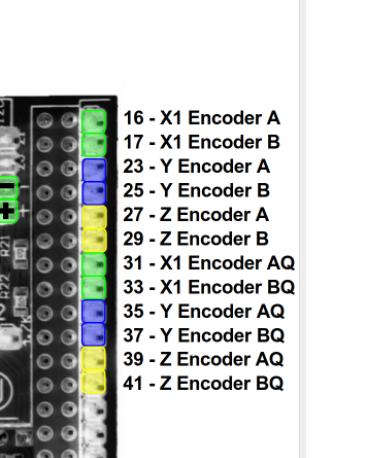
You can dive deeper into encoder troubleshooting by downloading and using the Arduino IDE. This will allow you to see if the encoder signals are being received by the Arduino.
Looks like you enabled endstops and encoder at the same time (only for x-axis). Maybe your Arduino awaits the signal change on the endstop pin and ignores the motor stalling?
I would try to disable the “enable endstop” for x-axis.
“enable endstop” i have try to disable ! it is not work ! (only for x-axis because i just try x-axis ) ,xyz-axis i have for Several times the same as x
I too am having some issues with the calibration and homing.
When I home, the farmbot finds the 0 position but like Ardun said, the motors hit the end of the track and continue to move against the track end, after 30 seconds the motor stops.
As far as the calibration, I’m completely lost.
I execute the calibration, farmbot starts to move slowly down the track counting the steps but once it hits the end of the track it also continues to try and move even thou it hit the end of the track. The motors stop after 30 seconds or so. Then when I look at my controls tab in the web app I can see the distance the farmbot had established but the number just continues to increase by 10.
I’ve got a gif of the steps increasing and it won’t stop until unless I restart the FB.
My understanding of encoders is pretty bad so I’m not exactly sure what they are doing when I execute the commands.
anyone have any good suggestions on reading material so I can understand what exactly the encoders are doing and why?
To get a better understanding of what your encoders are doing, you could view the encoder readings in the Arduino IDE Serial Monitor as I’ve mentioned above.
@Cjaramillogrows i didnt wait 30s i will end-stop ! so i just know it will stop after 30s thanks! @Gabriel i think the “find home” is it can back to the home and set the xyz can reset to 0 .