So the hardware was set up but I was still struggling with some issues.
Already solved ones:
The provided fuse on the Farmduino board is the wrong type for the holder on the board (see also the original picture in the BOM section of the Genesis 1.5 manual) . The holder is for standard size blade fuses and not mini! When there is a mini blade fuse in the holder it could be that there is no contact.
There was a jumper in the “ENDSTOPS” section of the Farmduino board which was set as shortcut between GND and 5V!
Made a 3D printed water protection shelter for the electronics box because the box isn’t sufficient water tight for heavy rain. Already sent detailed report via e-mail. @roryaronson Please check above mentioned issues for future deliveries! It is very frustrating to find such issues by the end.
Issues I’m still fighting against:
I have issues equalizing the gantry. I tried to equalize it as described in the manual at “Gantry => Attach the Drivetrain => Step 4: Equalize the gantry” but was not successful. I still have about a 4cm crooked gantry. I’m not sure if maybe one of the corner brackets is not exactly 90°. I will get some tools to check that but maybe somebody has another idea how I could solve that.
Z-axis can’t move up on its own.While the motor tries to move it it sounds like it looses steps. It works if I help a bit with turning the leadscrew. I have to mention that I haven’t used any lubricants on the leadscrew so far. Could this be the issue?
I’m surprised how loud the motors are while the Genesis 1.5 Farmduino should have Trinamic TMC2130 drivers which are described as “for ultra quiet movements”. I know Trinamic drivers from my 3D printer. While there still could be some sound it sounds like there aren’t Trinamic drivers on the board. Could this be because of too tight wheels? I tightened them until I was able to move the gantry (NO BELTS MOUNTED!) while turning a lower wheel. Like that there is about no play between the upper and lower wheels. Maybe this is too tight… Suggestions would be helpful.
Lubricant should help. If that does not help you can increase the motor current in the web app but make sure you don’t get over 1000.
You can’t compare a farmbot directly to a 3d printer, as the tracks are much longer which makes the track vibrate much more. But you are right, trinamic driver are supposed to be quiet as long as the Stealth Chop function is active. I’m not really used to the current firmware and electronic setup if a 1.5 device since I’m still running tmc2208 on a 1.2 device.
That does not sound like your wheels are too tight. The motors are most likely even without the belts noisy.
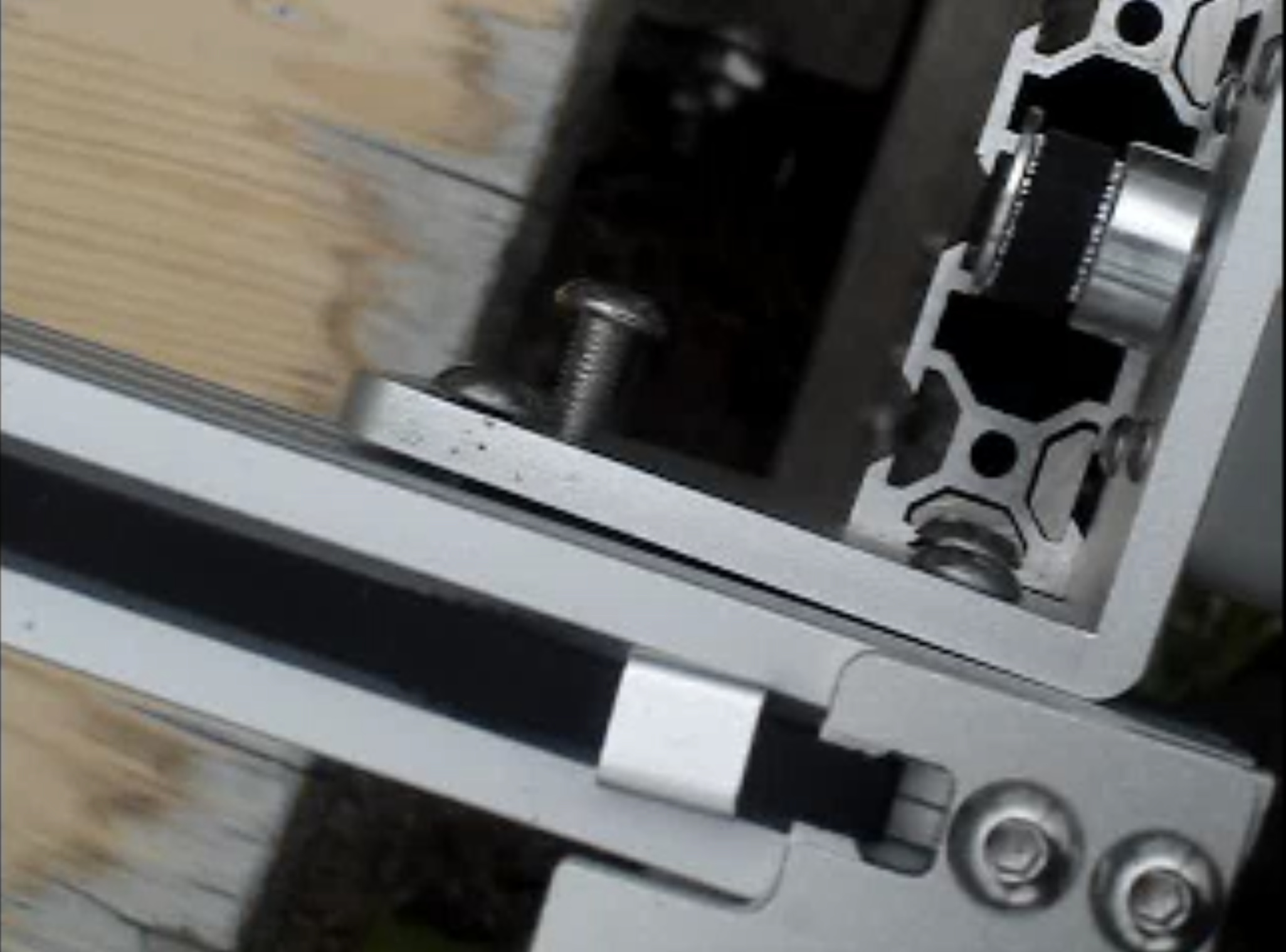
Hi @masze, I hope I understand your gantry problem correctly. We had an issue for our Express model where the gantry columns would be twisted (or the gantry not straight), leading to a misalignment of the wheels and frequent blocking on x-axis. As the angle of the corner brackets is predefined and not adjustable, we added a thread for an adjustment screw to the brackets. Like that we can compensate for misalignment.
Just as another datapoint, I followed the advice in the Genesis installation instructions in the “Eccentric Spacer Adjustment Reference Guide” which was:
The perfect fit is subjective and you’ll need to play around to get it just right. Here is our best tip: Adjust your wheel spacing so that it is as large as possible without inducing wobbling or rattling. This will ensure you are not over tightening your wheels and risking damage.
You would rather have a wobbly wheel that you can tighten later than damaged components now.
I set things as loose as they would go. After assembly, I made adjustments but found that I got smoother movement with looser settings.
I’m not at all disputing what others have said about it not sounding like things were too tight. Just giving another data point.
@jrwaters Good point. I’m someone who often overestimates precision on several things. So your arguments are valid and I think it should have some more play. I’m fine on the cross slide but not on the gantry. Especially when thinking again about the dimensions and the effective precision which would be needed to do that without play…
Thanks everybody for your help! I will try to implement all your suggestions during the weekend.
Yes, thank you for this report. Surprisingly we have not seen too many issues with leaky electronics boxes, though that isn’t to say we can’t improve the design in future versions. I’m thinking we’ll need a thicker and more compliant rubber seal, as well as a larger lip on the lid and box.
The suggestion by @jensGeorgsen for this issue is fantastic, though if you don’t want to drill and tap a hole, here’s another suggestion: what I’ve done before is loosen the corner bracket from the extrusion and just add a thin spacer on one edge between the bracket and the extrusion. Then retighten. You can use anything really, as long as it doesn’t compress and isn’t going to degrade. Cutting up some of the small zip ties included with the kit may work.
This will be coming soon to Genesis v1.5 kits by using the “stealth chop” mode of the drivers. In testing, it makes the bot virtually silent.
@roryaronson I think compliance to the existing standards is key. In regard to environmental conditions it is always better go higher than minimum as explained in my report.
The solution from @jensGeorgsen could be easy implemented in further versions. It would allow an easy alignment without fiddling if the brackets are not 100% square. I think it’s the ideal solution. The brackets are thick enough for a M6*6 (M6 because it has 3mm allen key ) ISO 4029 grub screw. There would be max. 1mm sticking out if done like that and one turn would be 1mm. So it would even be possible to set up a calculator in the build manual like: “Enter difference: xx mm => Turn grub screw x.x times.”
ok…ok… I stop here.
Good to know that the noise is because stealth chop isn’t active right now. Can’t wait to hear the difference.







 ) ISO 4029 grub screw. There would be max. 1mm sticking out if done like that and one turn would be 1mm. So it would even be possible to set up a calculator in the build manual like: “Enter difference: xx mm => Turn grub screw x.x times.”
) ISO 4029 grub screw. There would be max. 1mm sticking out if done like that and one turn would be 1mm. So it would even be possible to set up a calculator in the build manual like: “Enter difference: xx mm => Turn grub screw x.x times.” 

{kind=link}