I am curious to know what range of speeds other FarmBot users and team members have their FarmBot running at.
Ours currently set to run very slow so that I can catch any errors or missed steps, but we are gaining confidence and we would like to “dial it up” a bit.
Current relevant settings:
X = 20
Y = 20
Z = 10
Acceleration = 500
I’ve got a slightly different setup with 2,5A motors and TMC2208 drivers. I reduced my speeds recently because my solar voltage is pretty low sometimes 
Right now I’m running at:
X:100mm/s
Y:100mm/s
Z:12mm/s
ACC:25mm
But usually:
X:150mm/s
Y:150mm/s
Z:15mm/s
1 Like
Ok, Good to see my Z is close to yours, and now I have a range to slowly creep up on…
I will try each Axis (X & Y) in 10 mm/s increments, and use say 80 as a ceiling, for now…
What is the diff between the motors/Enc you have over mine (stock FB Gen 1.4 kit)?
I just read the datasheet for the TMC2208’s…
Did you have to modify code or just swap them?
Your motors are usually rated with 1.7A max current, while mine are rated with 2.5A. That should not be a problem because the stepper drivers are usually not running that high. I just had to buy these, because there were no others with dual sided shaft to mount my encoders.
My encoders are mostly the same, the only difference is the CPR, means the signal pulses per rotation. Since you have got the farmduino with the co-processor (I think that was at 1.4) you could achieve mich higher speeds until you will get problems with undetected steps. I still use the good old mega 2560 chip and have not experienced any speed restrictions yet 
You can just swap the TMC drivers. They are preset on 1V Vref which is okay, but you can set them a bit lower. In the past you had to invert the direction of the axis, but nowadays most drivers are already set properly. There is just one thing that will change: the microstepping. The tmc2208 do not have full step anymore, the lowest microstepping is 1/2 step. But they are super low on noise even when running on my speeds with half stepping.
I’ve seen that the FB coders are implementing the TMC2130 with UART communication recently. But using them this way will probably require to use a new farmduino. So if you don’t want to wait and give it a try (~35$ invest) I would definitely recommend to try out TMC drivers. There are a few types of TMC drivers available, check them out in the web (Here for example) to find the one that fits your needs.
2 Likes
Thanks for the detailed info…
Off to read up from the link…
Expect me back at some point with more questions (fair warning and gives you time to hide!  )
)
1 Like
Which TMC2208 drivers did you purchase and where?
I see quite a few vendors.
Some look to have the IC mounted facing down, with the adjusting screw inaccessible after install.
Sadly I can’t provide a link anymore because all the drivers that I purchased are not available anymore.
But the drivers that I have are also as you described, with the IC on the bottom side. The screw of the pot is still accessible through a small hole on the board right on top of the pot. I haven’t found any driver yet, where you can’t access the screw from the top.
1 Like
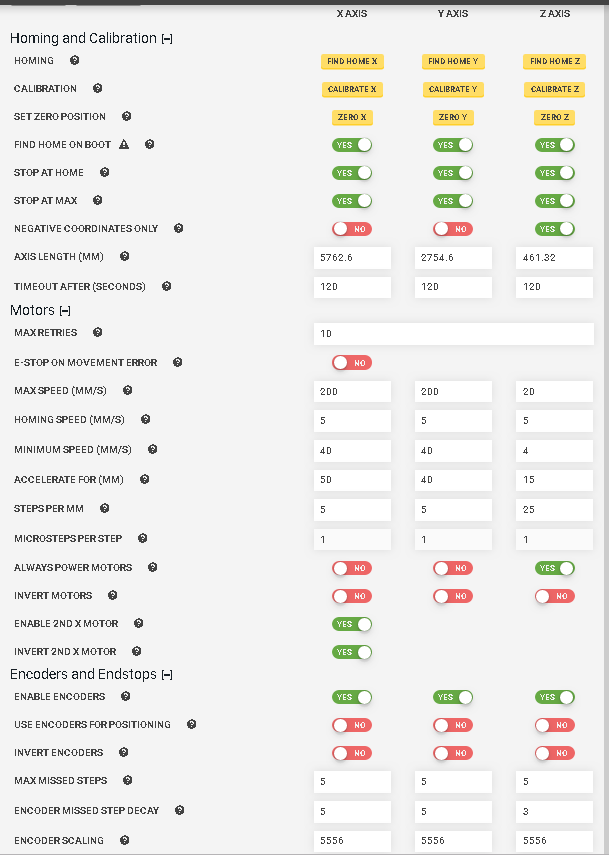
With a stock 1.4 XL kit and unchanged Vref I’m running these:
X: 200mm/s (50mm accelerate)
Y: 200mm/s (40mm accelerate)
Z: 20mm/s (15mm accelerate)
Can yo post all your devise settings too, please?
Min speeds, encoder info, etc…