Main reason I was asking about accuracy was not just about building a untethered bot but also reducing complexity of tethered to allow larger areas to be used. .
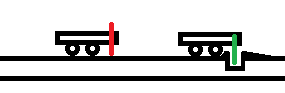
Now my brain just caught up with itself. No wonder the length is limited to about 3 meters the longest axis is done wrong. Using a looped belt equals putting force in 6 meters of belt for a 3 meter bed.
http://www.makerstore.com.au/blog/v-slot-the-ox-cnc-machine-and-the-everman-belt-drive-system/
The best in CNC belt drive is everman but the patent on that expires 2028-2029. Even so don’t stick belt in slot(so not covered by everman patent) and copy the on gantry drive of an ever-man would take max drive range from 3 meters to 6 meters using the same length belt.
There has been something feeling super odd about the farmbot every time I look at it. The odd thing is all large CNC with gantry all the drive motors are on/in the gantry and farmbot not all drive motors are on gantry.
A looped belt in the top of gantry makes sense to reduce number of moving wires. From what I see is the controller is on the gantry anyhow so this means wires are having to leave to drive the motors. Dependable CNC machine keeps the number of bending wires to a min.
If required accuracy is about 2cm remember Lidar for range measuring gives 3mm and ultrasonics give about 6mm having a belt in rail may not be required for the longest rail if drive is placed in gantry and it is using a track like a rail track
Using the cheapest ultrasonics a bed of over 7 meters would be possible. Yes you would stand up reflector plates at each end as end stops. Yes this is still a rail system. The thing to remember the longest axis is the most likely to have belt issues. So if the longest axis can be made belt less dependability will increase.
No belt into the longest axis would make it possible to pickup gantry and move it between rails. Since you have a camera all ready you could place some ID marker at end of a bed for gantry to work out where it is.
There are a few differences with me.
- I will not need something like farmbot to water plants.
http://www.sgaonline.org.au/wicking-beds/
I use wicking-beds. So you fill a under bed reservoir with water and that water travels up through the soil. The water level in the reservoir can be done with a basic float valve. This is a fairly natural automatic controlled watering system. If the float valve blocks up you have over a week to find out about it without the crops knowing anything.
- depend on how the seeder ends up designed over time I might not be needing the vacuum line either.
Something to remember if weather is going to be wet that would be the ideal time to-do maintenance on the gantry if you can bring the gantry inside.
http://www.urbanfoodgarden.org/main/vegetable-patch-design/vegetable-patch-design--size.htm
Part of my problem is the size of the machine. 2x3 meters is what people can take care of without investing in a machine if they are serous. Could people have garden beds double/treble this to meet food wants the answer is yes.
Please note you do not want wide than 2 meters as all this triggers is people walking on bed to get things. 1.4 meters wide 6 meters long would be head in the direction of right size. This is why at a min we need to serous-ally look at the longest rail and see what can be done. lidar sensors would let 75 meter beds for 400 dollars of sensors and possible 100 dollars of control system. Powering a bed that long would be a challenge.
{kind=link}