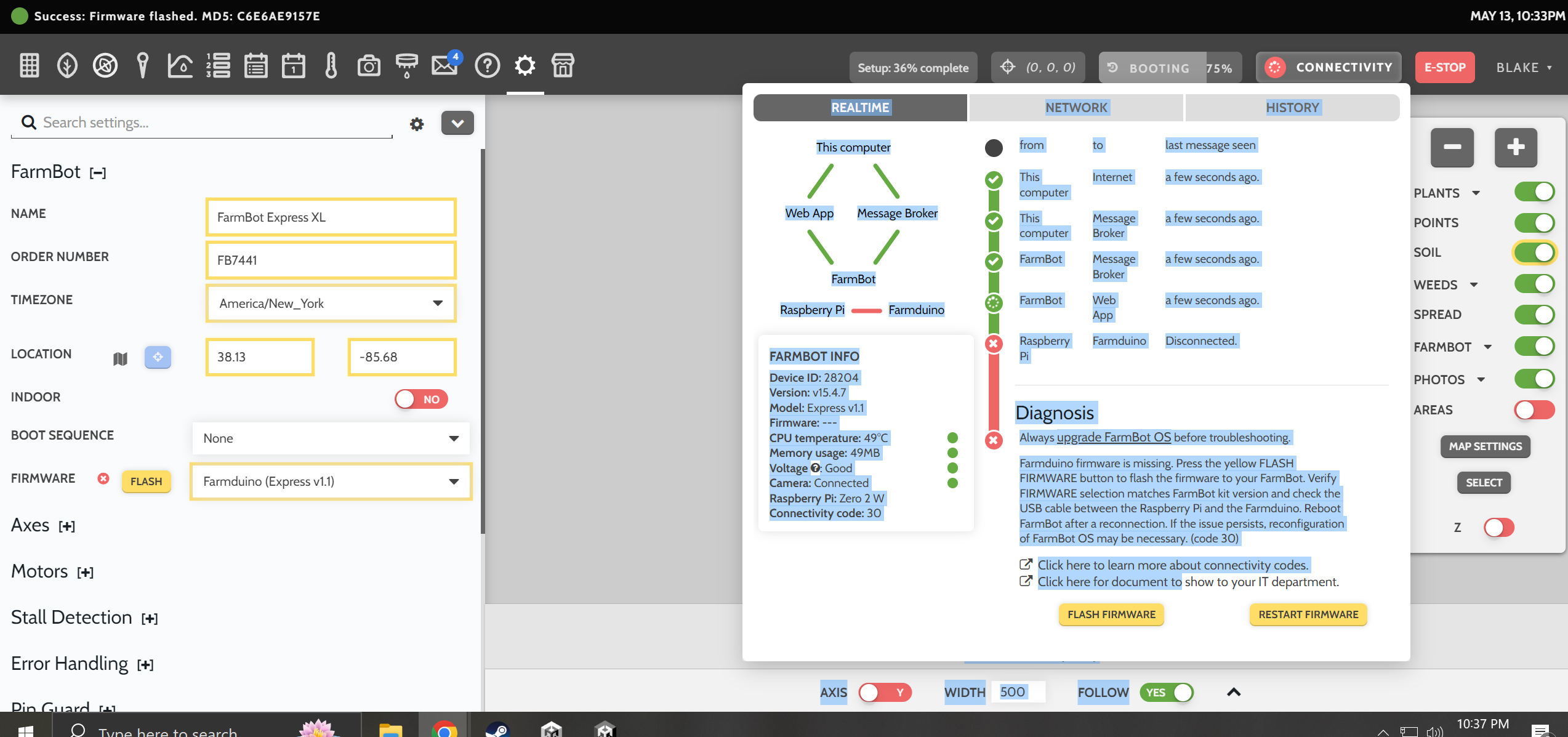
I seem to be having a known issue regarding getting my farmbot to stay connected long enough to give it commands, It will move slightly and give a relative movement error and then seem to disconnect from the raspberry pi to the farmduino. Sometimes getting a uart ttyAMA0 ttyUSB0 error on reboot
I was able to complete the setup to testing the X axis when these errors
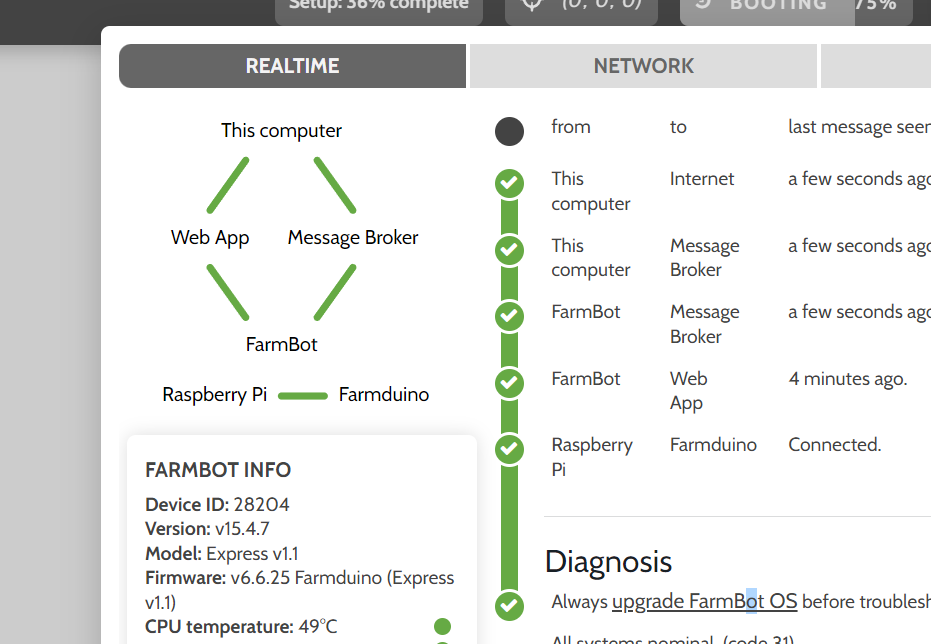
began to occur, here are the stats from my.farm.bot in the images below and within realtime my device information : Device ID: 28204
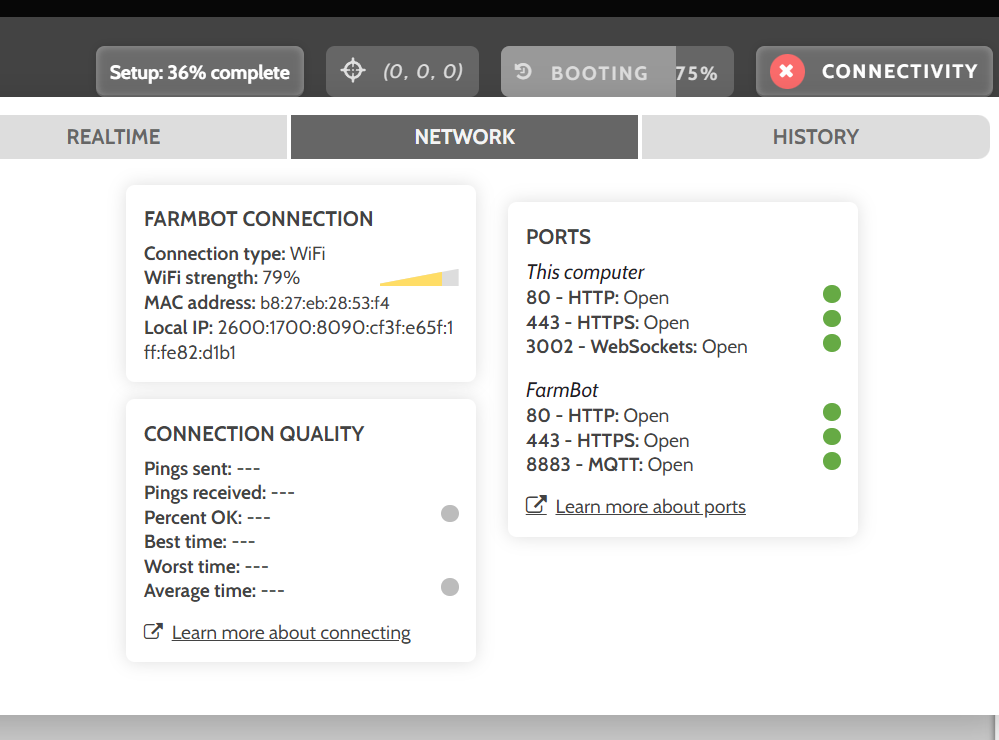
I do not know if it is relevant, but I have seen strange things with Wifi with dead spots in the Wifi. In one case I had a perfect deadspot on my dinning room table. Move 1 ft to the left or right worked but there was a complete deadspot. I changed the channel, which solved that issue.
So.
If the FB is in a fixed location where you have a good connection, are you able to send it commands (that do not move the X,Y) successfully?
Hey, thank you for the reply. I’ve been moving the mesh router parts a bit to make sure the connection is good, the bed was freshly built last month with the farmbot just being setup for the first time none of my other devices seem to have an issue with a solid connection.
I have been able to send commands to both the X and Y axis, however both get stalling detection and usually this is when the disconnect occurs.
I have noticed a number of firmware flashes on my system. I don’t know why that has started.
As far as I would expect, forward flashing would not occur on a regular basis.
@jsimmonds Hi there. Any thoughts about how often firmware should be flashed. In my mind, it should be ONLY after there being an update released. Mine seems to be doing it allot more than that.
Why would the design required a flashing of the firmware so regularly. That seems almost a reactive control rather than a designed control. In my simplistic view of the world you would not reprogram the firmware unless there is a need to do so.
That is my expectation and I expect it was put in place as a ‘fix’ but in my mind it is not good architecture to keep blatting the firmware as it suggests the firmware is not stable, reliable and or has a tendency to become corrupted.
I always look towards ‘safety’ and remove the hazard rather than working around symptoms.