lately I noticed this project has outgrown my original goal. I’ve been inspired by AgOpenGPS, an open source project on adding RTK-GPS to existing tractors to allow autosteer. It’s not that well documented (information is spread through a massive amount of pages on combineforum) but it is successfull! Next month there’s a workshop on it here in Belgium, I’m thinking about attending.
But I’m no farmer and have no tractor… What the hell am I doing there??
My original goal was to make a robot to tend to my garden of a few 100m², not a farm of a few hA. Also, RTK will probably not work reliably in the greenhouse, or near trees, so in most of my garden…
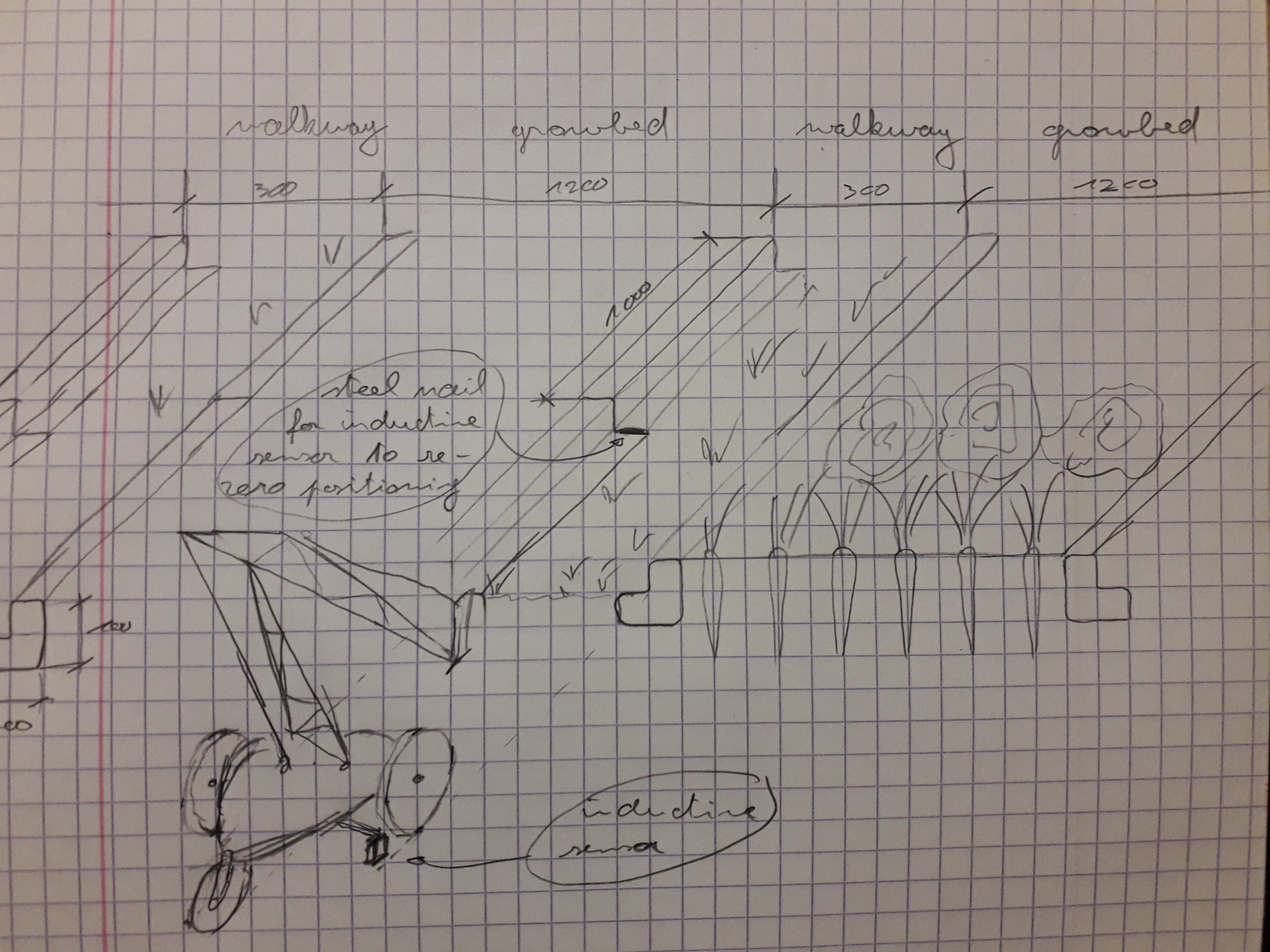
So I’m thinking about switching to another concept, without RTK, but possitioning on ‘rails’ of concrete L-profiles, encoders on drive wheels, re-zero every meter by magnetic detection (e.g. a nail dipped in construction glue in between the L-profiles), alternating between walkways and growbeds, and mounting the tools on an arm. concept sketch:
I’ll have to re-build my vegi garden anyway soon (got kids, they need a big tree to play, veggies have to move) so I might as well make it a project!


