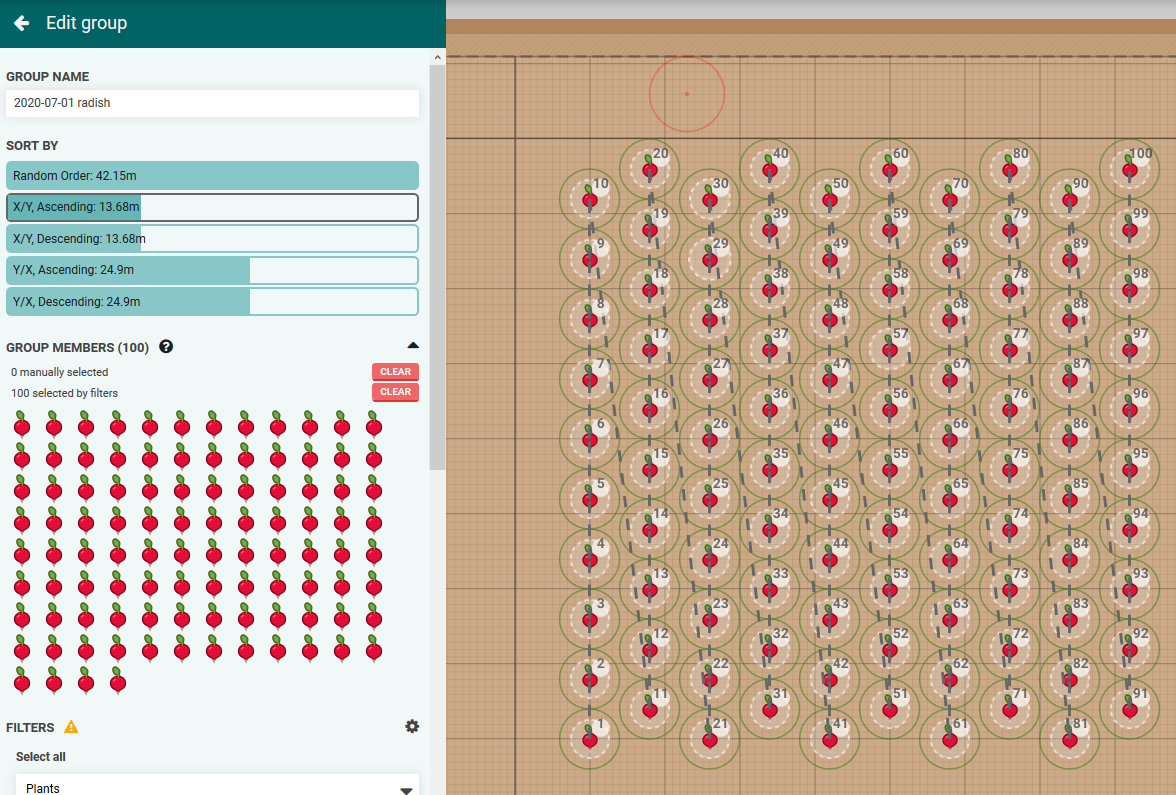
when I show the robot I often get a comment concerning the path planning that seems to be visible for a lot of people: The robot is always going back to the beginning of a row to restart the activities (watering, seeding). It might just do this activity back on the way to the beginning. Please see the following screenshot:
@jensGeorgsen This is on the roadmap, but it’s not the highest priority at the moment. We are still focusing on stability / weed detector v2. I will let the team know that this feature has a higher demand than we have anticipated.
I’ve also noticed the FarmBot seems to pause between queued moves. Like if it has commands to go to 100, 100, -100 then to 200, 200, -200 then to 300, 300, -300 it will accelerate and decelerate between the moves instead of doing a smooth run between them. This slows down the whole procedure quite a bit, and makes more noise.
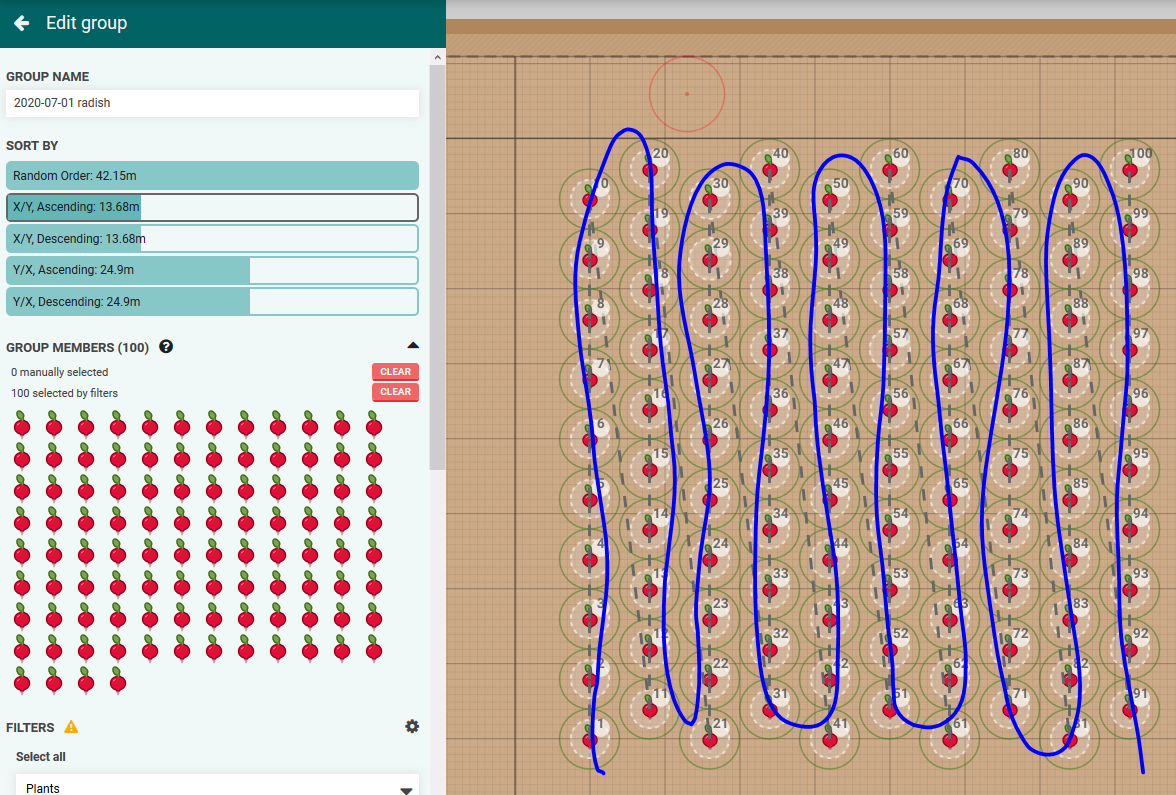
Yes, I would like to be able to have my FarmBot water my rows in X, increaseY, then on the next row, X, decreaseY. Too much diagonal movement and time wasted. (I know I can do this with a bunch of sequences, but it would be great if in Groups, it could figure this out, or you could manually select a watering order for a group. I always try to minimize how much X movement the Bot has to do. So I always go to X, then water all the Y coords, then next X and water all the Y coord.