Based on our current testing, retrieving seeds from the seed box each time is inefficient. If sowing is done at multiple locations, it requires two trips back and forth to each location, resulting in low efficiency and accelerated equipment aging.
I’m wondering if continuous sowing could be implemented, requiring only one seed retrieval for multiple sowings, significantly improving efficiency. If multiple runs affect positioning accuracy, we could improve accuracy by sowing in groups, performing a “find home” check after each group is sown.
I’ve reviewed previous posts but haven’t seen any discussion of this approach or feasible solutions.
Has anyone considered this solution? Discussion is welcome.
I tried using the version you provided, but there were some issues with the model printing. Based on how it works, I redesigned a simpler version myself.
No problem. I’ll release the model after I’ve perfected it and done some testing. It’s not running with Farmbot yet. I’m only controlling it via ESP32 to test if the seeder is working.
However, there are some additional issues that need to be addressed:
This rotation method easily crushes the seeds.
It can’t yet accurately sow only one seed at a time.
Fixing the tool head.
12V power supply for the tool head.
The ability to control sowing through the Farmbot mechanism and integrate it with the sequence.
This likely requires developing a separate tool head for digging holes and a burying tool head. The digging and burying tool heads could also be replaced with different connectors on the rotating tool head.
Alternatively, watering could be used to cover the seeds with soil.
The complete sowing process could be achieved by first using the digging tool head to dig holes and position them, then using the seeder to sow the seeds, and finally using the burying tool to cover the soil.
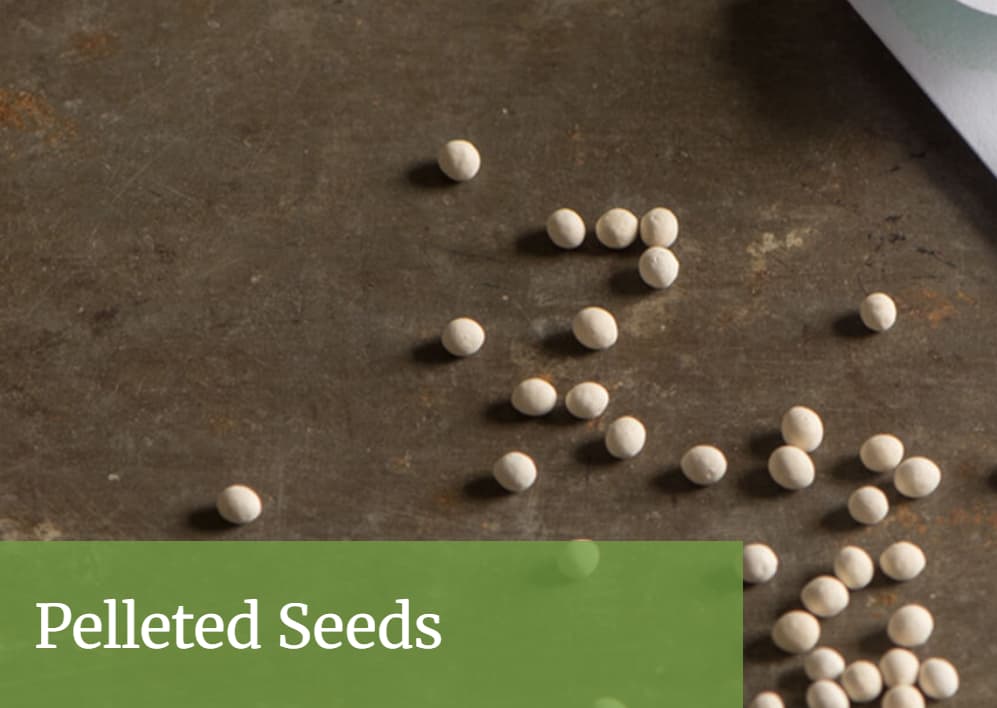
@ncnynl I need to mention that you should try using pelleted seeds with the seeder tool. It will function better and the spherical shape and additional protective coating will reduce friction. As the gravity fed seeds move inside the seeder tool to the open space inside the turnstile the pelleted seeds reduce the instance of crushing the seed inside the turnstile mechanism controlled by the servo motor.
Currently, I’m using locally available round or oval seeds with a diameter of approximately 1.75 mm. I will also test the coated seeds you mentioned in the future.
The newly designed seeding tool has been tested for over an hour of continuous operation. The problem of crushing seeds has been significantly reduced. The previous design had a noticeable cross-cutting issue, but by placing the seeds on one side, the situation has greatly improved.
I will test different seeds later when I have time to see how they perform. My priority now is to integrate it with FarmBot and use it in our experimental field to see the results.
I will provide updates on any further improvements here.
I connected the G pin of the general-purpose tool head directly to port D4. Currently, pins A=5V, B-C=GND, and G=D4. This allows for sequential control of the servo motor, with pin 4 selected for control.
In principle, pins 4, 5, 6, and 11 can all be used, as long as they are connected to different pins. These pins are all servo control pins.
Farmbot has done a very good job of making expansion extremely easy.
Yes, this makes sense. Batch/continuous sowing with a single seed pickup could significantly improve efficiency, and periodic “find home” checks after each group should mitigate positioning drift. I’m surprised this hasn’t been explored more would be interested in any technical constraints others have identified.