Hello community, I’m writing here again! This time to share with you the progress we are making on the FarmBot prototype. We could say that in this state it is called FarmBox! ![]()
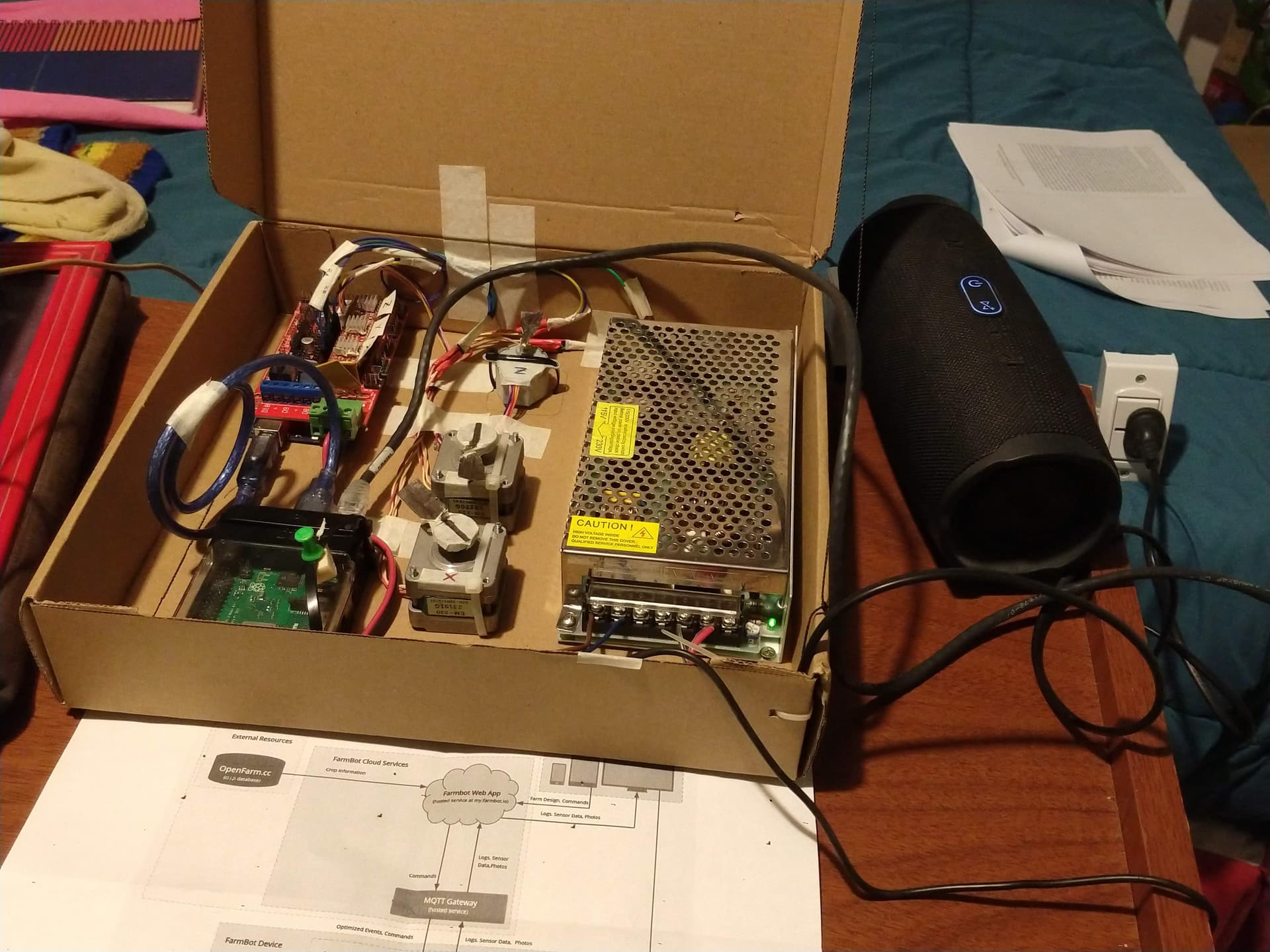




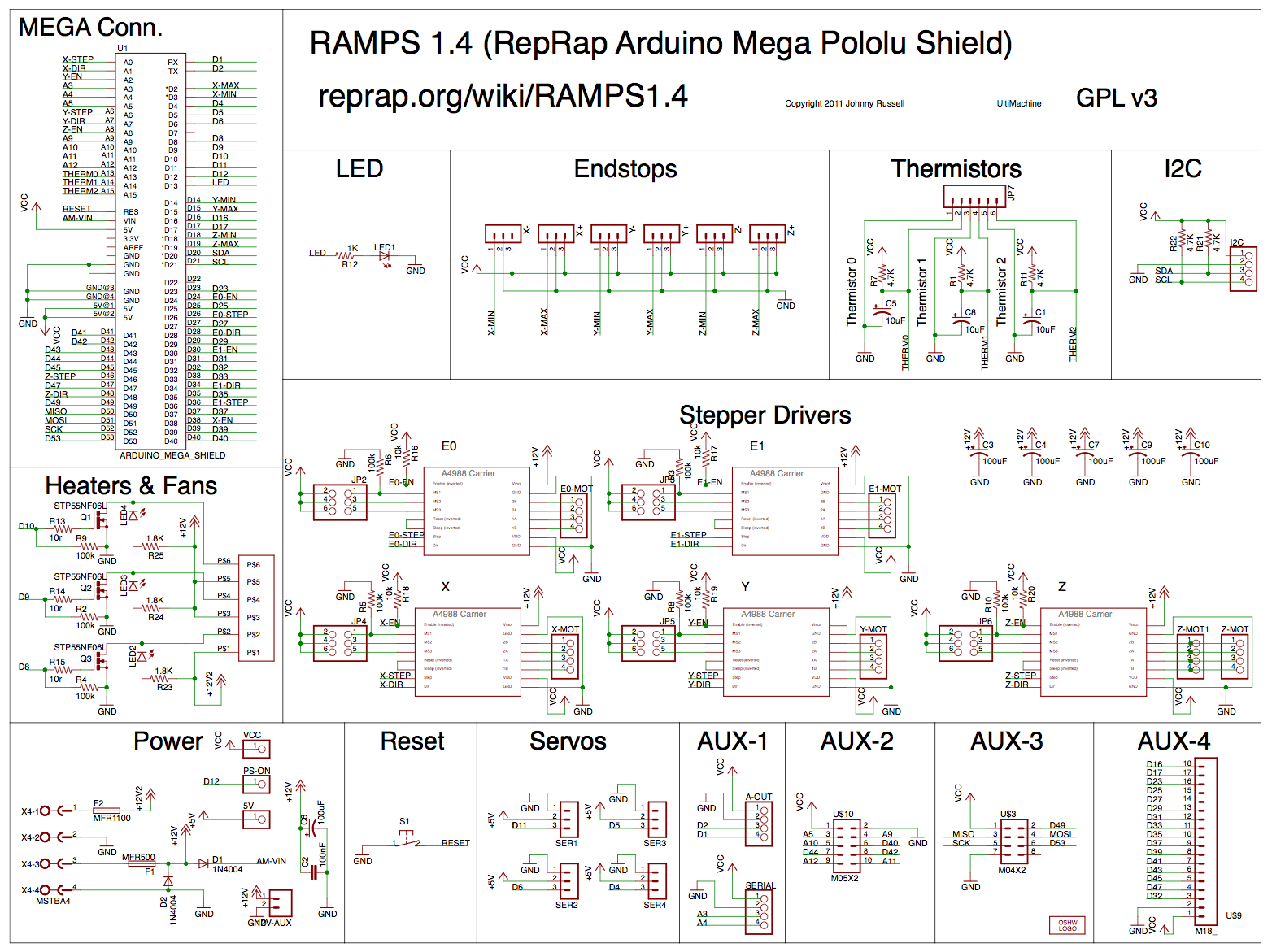
For now we have successfully working the communication of the web interface with the electronics of the prototype, based on the initial configuration of Arduino Mega with RAMPS 1.4.
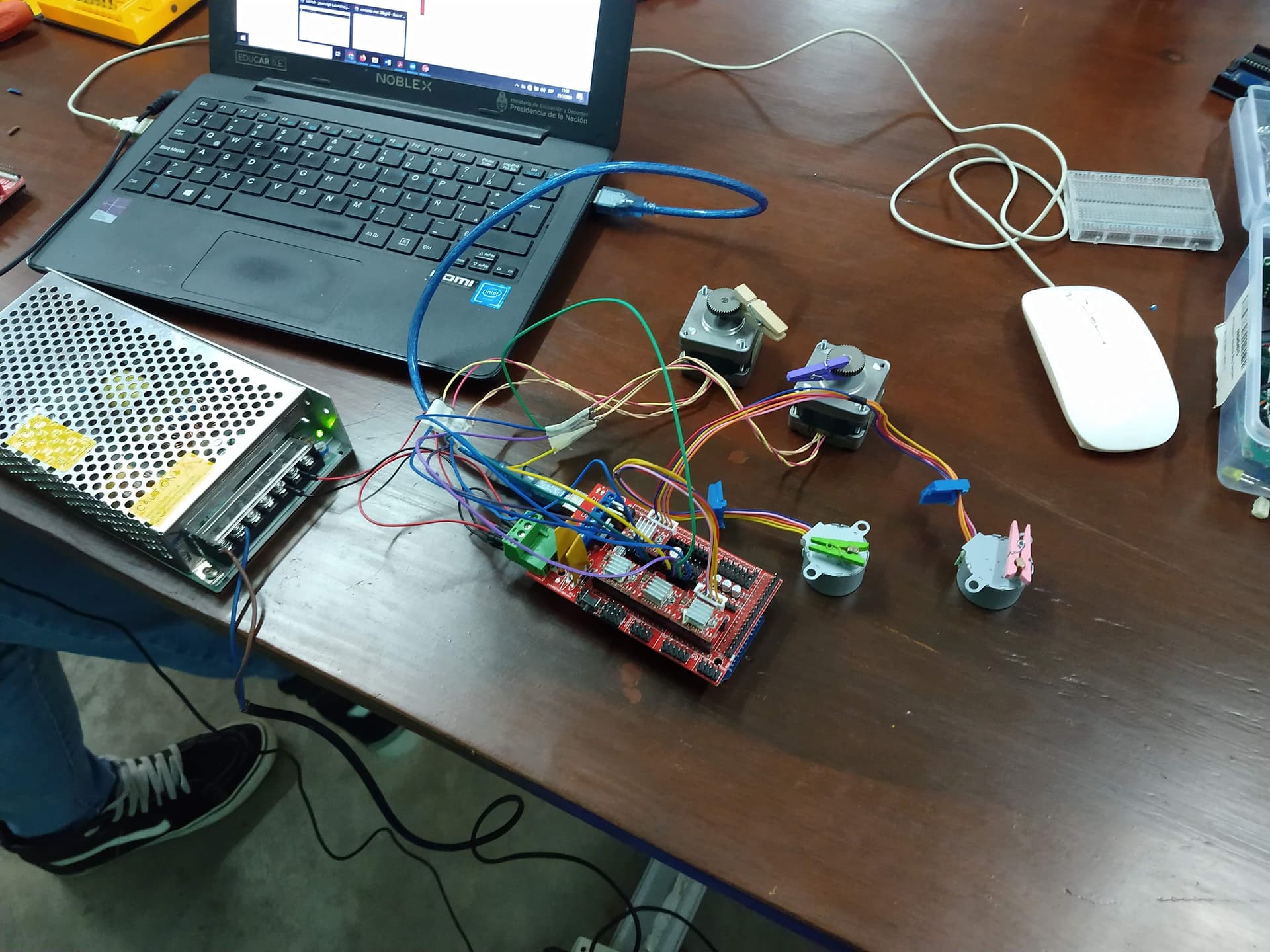
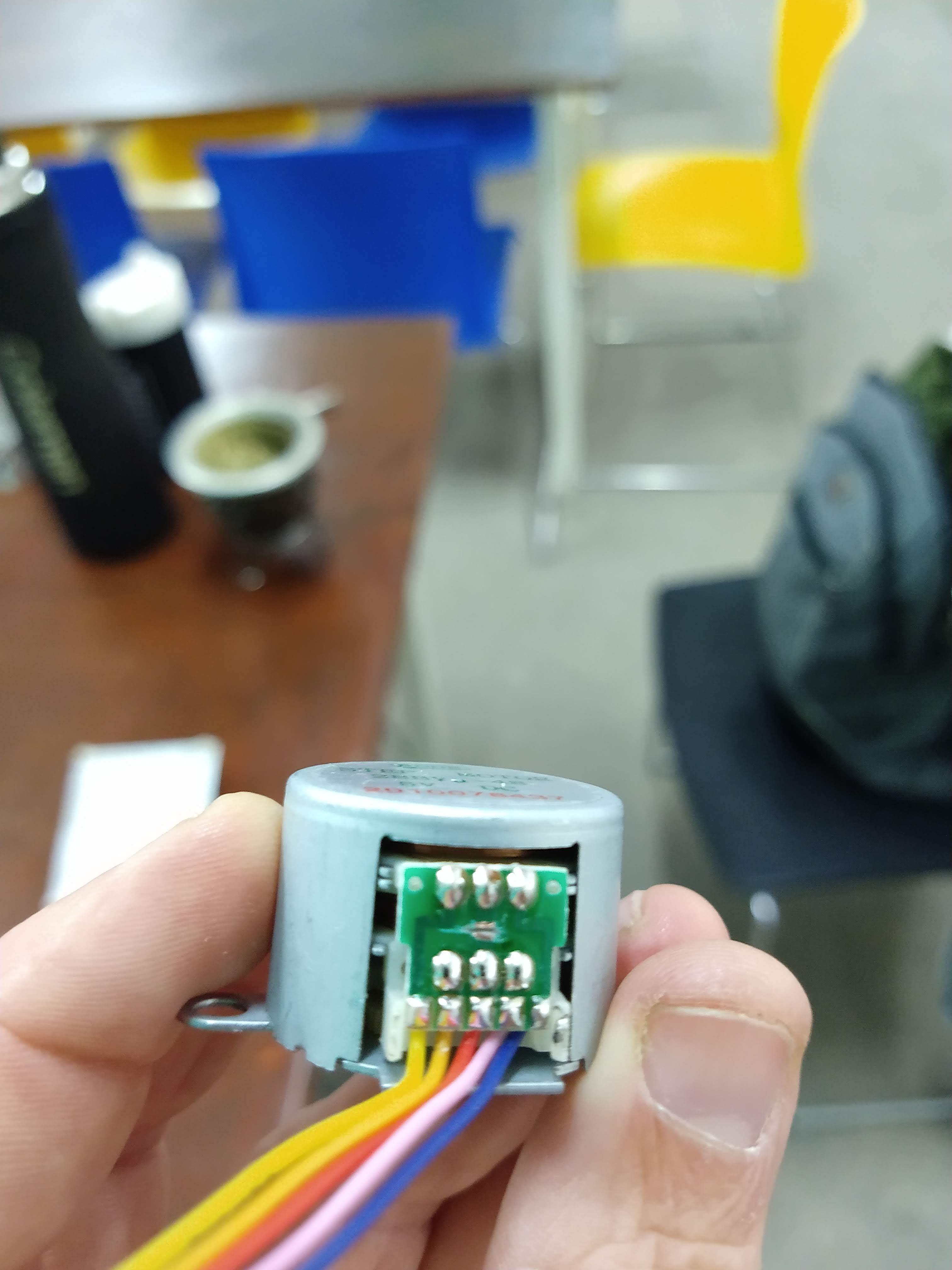
We use 2 recycled NEMA 14 style stepper motors (I think from an epson printer) and a traditional unipolar stepper motor (28BYJ-48) from the arduino kit. All the motors use an A4988 driver.
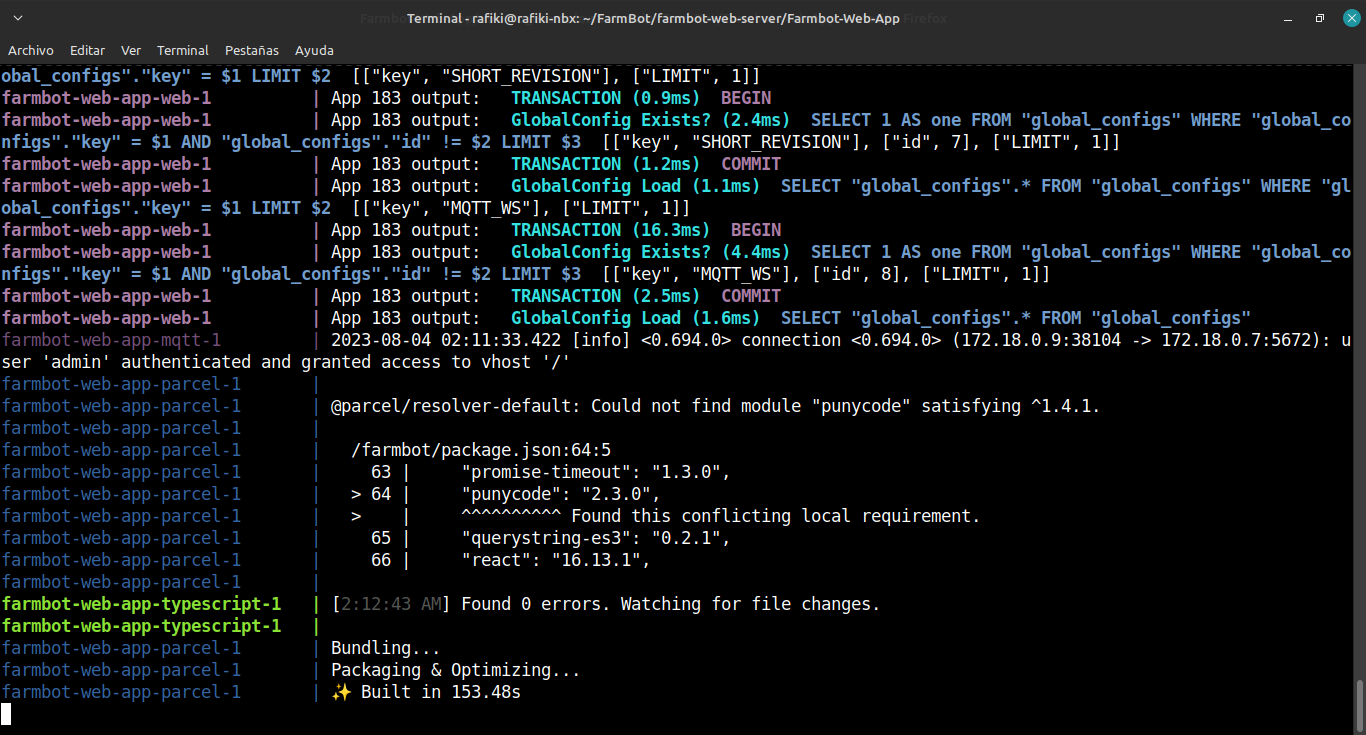
These last tests were carried out with firmware 6.6.21 and farmOS 15.4.3 on a RaspBerry PI 3b+.
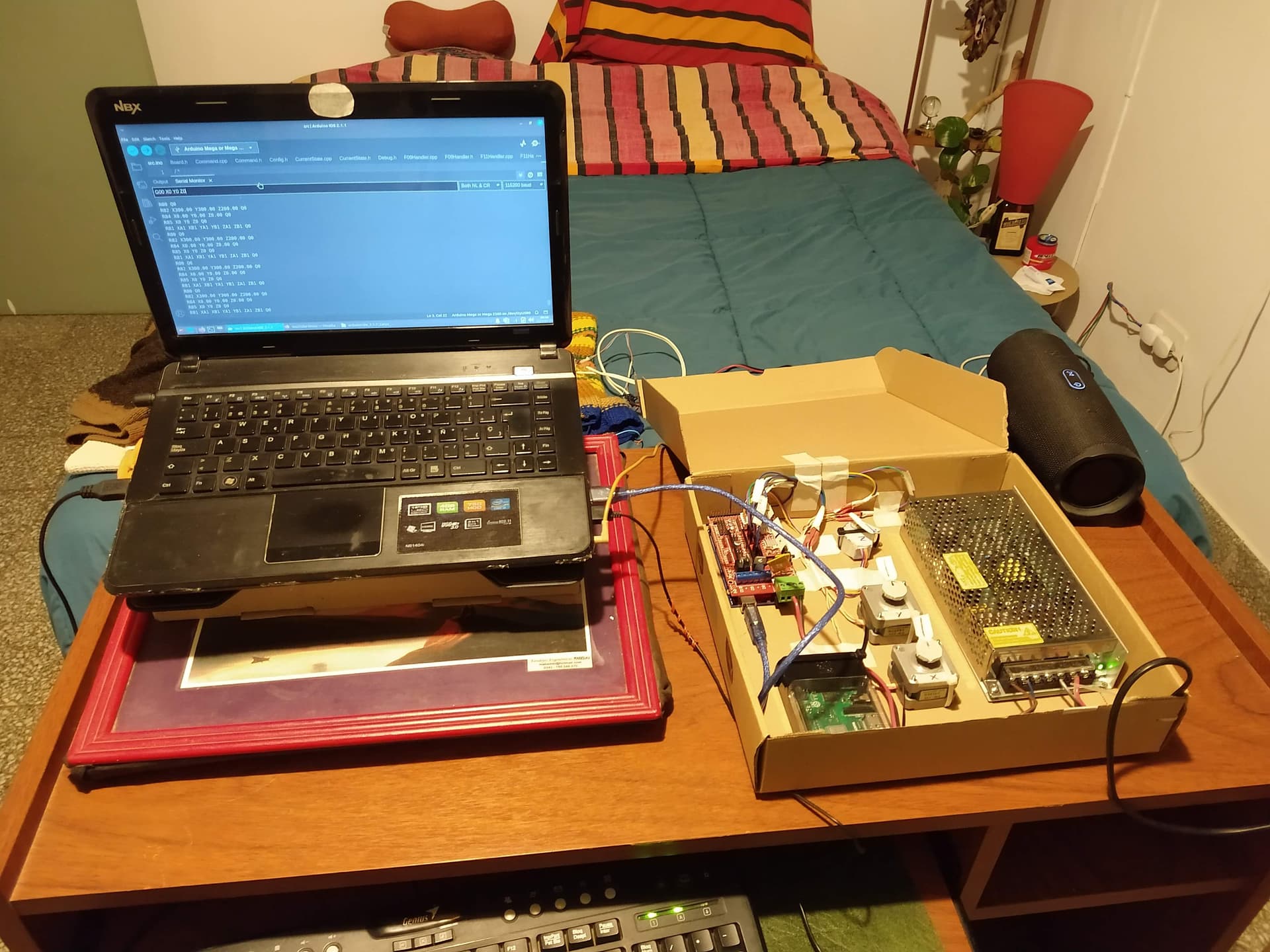
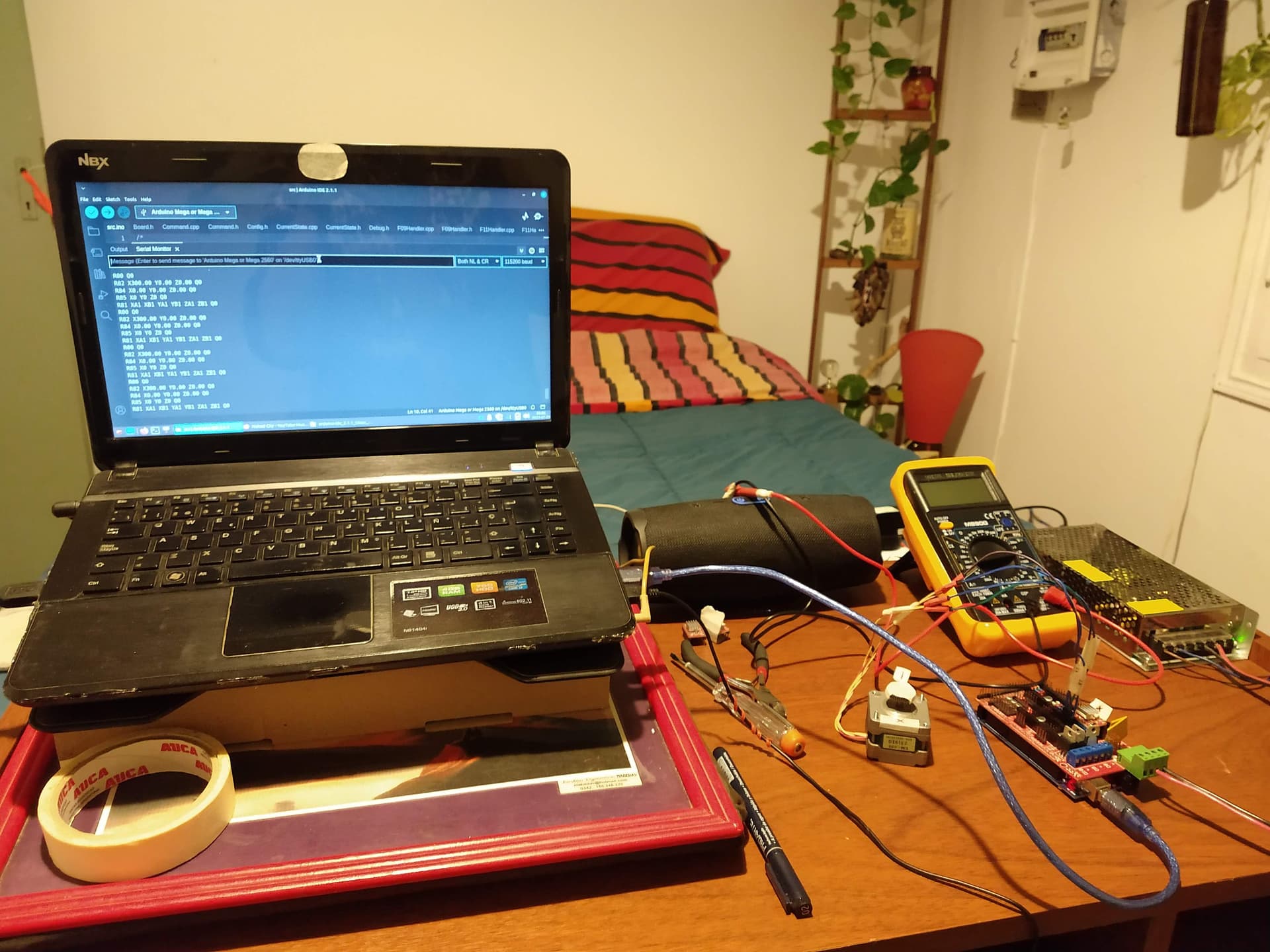
After overcoming several challenges we managed to communicate directly with the firmware and control the movement of the motors through the console, which helped us to learn more about the G and F code protocol, as well as continuing to learn about the entire ecosystem.
Video final:
Video G and F codes:
Then we were able to complete the final step (which initially gave us problems) to be able to control the electronics directly from the web interface!
We are very happy with this progress.
Thanks to the support of the mentoring at Active Capital and the FabLab programme that helped us a lot with the electronics.
We plan to publish more details of the process we are going through.
I send you a big hug and thank the FarmBot team for continuing to bet on making this project grow together with the whole community of enthusiasts, educators, DIY, and users who are excited (enthusiastic for the common mortals) with ideas like these.
![]()
![]()
![]()
Español:
Hola comunidad. ¡Vuelvo a escribir por aquí! esta vez para compartirles los avances que estamos teniendo en el prototipo FarmBot. Podríamos decir que en este estado se hace llamar FarmBox!
Por ahora tenemos funcionando satisfactoriamente la comunicación de la interfaz web con la electrónica del prototipo, basada en la configuración inicial de arduino mega con ramps 1.4
Utilizamos 2 motores paso a paso estilo NEMA 14 reciclados (creo que de una impresora epson) y un motor paso a paso unipolar tradicional (28BYJ-48) de los kit de arduino. Todos los motores utilizan un driver A4988.
Estas últimas pruebas las realizamos con el firmware 6.6.21 y el farmOS 15.4.3 sobre una RaspBerry PI 3b+
Luego de superar varios retos logramos comunicarnos directamente con el firmware y controlar el movimiento de los motores a través de la consola, lo que nos sirvió para ir conociendo más el protocolo de códigos G y F, además de seguir aprendiendo sobre el ecosistema completo.
Luego pudimos completar el paso final (que un inicio nos dio problemas) para poder controlar la electrónica directamente desde la interfaz web!
Estamos muy contentos con estos avances.
Gracias al apoyo de la mentoría en Capital Activa y el programa FabLab que nos ayudó mucho con la parte electrónica.
Tenemos planeado publicar más detalles del proceso que venimos realiza
Les mando un fuerte abrazo y agradezco al equipo de FarmBot por seguir apostando a hacer crecer este proyecto junto a toda la comunidad de entusiastas, educadores, DIY, y usuarios copados (entusiasmados para el común de los mortales) con ideas como estas.





{kind=link}