I absolutely wanted to have a silent FarmBot so I ordered a Farmduino 1.4 and some TMC2208. Farmduino 1.5 and 1.4 are mostly a drop-in-replacement: The screw holes match exactly and the motor, encoder, USB and UTM cables fit without any change. The cables for the valve, the vacuum pump and the led are rotated by 180° which is no problem for the first two. For the led strip I had to reverse the polarity. The power cable for the Farmduino 1.4 uses a yellow connector while the Farmduino 1.5 uses a red one. The are made not to fit. However I could loosen the crimped contacts with a small flathead screwdriver and change the connector.
The SilentStep mode is fantastic! The FarmBot moves very quietly which is a huge improvement. I had to adjust microstepping and steps per mm but all axes are moving now if I deactivate the encoders. The z axis also moves with activated encoders but for x and y the stall detection stops my axes. I do not know why this is happening because the encoder scaling matches perfectly.
During movements I see weird encoder values in the web app. Sometimes for a small part of a second a negative value is visible. However when the movement stops it always settles on the correct values. That means the counting of encoder steps works as expected. I don’t know why the webapp displays those weird values briefly in between.
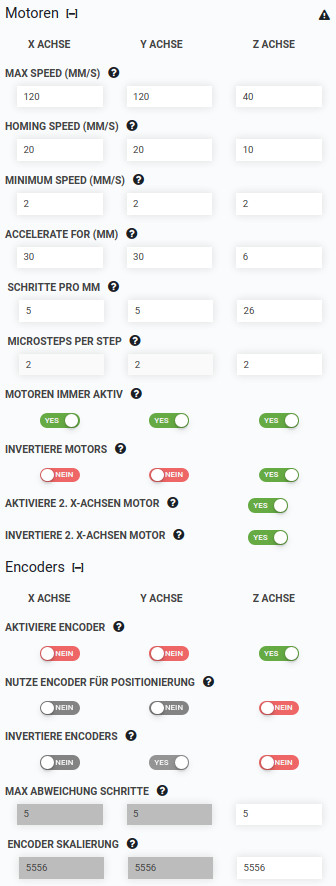
Here are my current settings:
Any ideas why the Farmduino Firmware detects stalls even with a perfectly matching encoder scaling?