My Genesis XL 1.5 suffers from a “Movement Failed. X axis stall detected” syndrome when it nears the end of the bed.
The rails are straight.
What’s the best way to reduce the sensitivity of the stall detection?
My Genesis XL 1.5 suffers from a “Movement Failed. X axis stall detected” syndrome when it nears the end of the bed.
The rails are straight.
What’s the best way to reduce the sensitivity of the stall detection?
You can play around with MAX MISSED STEPS or MISSED STEP DECAY. If you want to set the values back to default, you can see the default values in the help text.
But its advised to check the hardware first, also check your moving speeds. Usually the stall at the end of the X-axis is caused if one side of the gantry moved further than the other one which is mostly a hardware thing.
These are some tips to follow to ensure that your FarmBot does not stall due to physical imperfections in the tracks and the hardware. These points may not directly address stall detection sensitivity but they will help to ensure reliable operation.
1.When you are assembling the tracks, DON’T HAMMER ON THE ALUMINUM. This can wreck your tracks. The dowel pins may be slightly too large for the holes. If the dowel pins are too large and don’t fit, then don’t wreck your tracks by hammering the tracks together. Just assemble the tracks without the pins. [The dowel pins are OPTIONAL and meant for alignment only]
2.When you are setting up your tracks, please ensure that the diagonal surfaces do not have any bumps, gaps, or misalignment. You may need to take some sand paper to sand away any discontinuity in the track surface. When you touch the interface between the two tracks, the surface should feel perfectly smooth as if it were a single track.
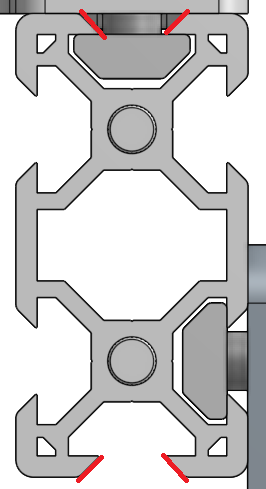
The surfaces that I am talking about are marked in red [See Graphic Below]. These are the only surfaces that make contact with the diagonal surfaces on the wheels. These surfaces need to feel smooth to the touch where the sections of track join together.
3.The main reason for motor stalls is small resistances in the movement of the wheels. To reduce or eliminate these resistances to movement, you can remove the non-essential wheels.
4.Check the top and bottom of the tracks. Any discontinuity in the diagonal surface that the wheels run on will cause a motor stall. Any jump, bump or misalignment of the track will cause a stall. These small problems can create issues when trying to calibrate the FarmBot.
Please watch the Blue Loctite YouTube video to understand the exact application:

Additionally, even though you say the rails are straight, I wonder if they are parallel? You mention that the X axis stalls when it gets near the end of the rails. The rails could be slightly parallelogram shaped, so despite being straight there may be a wider gap between the rails at one end. Careful measurement at each end of the rails could help, along with some spacers / shims if required.
Thanks @dmbgo. The rails are definitely straight and parallel. The issue was solved by increasing the MAX MISSED STEPS to 8.
Thanks for letting us know what the solution was Phill
![]() Trapezium shaped ?
Trapezium shaped ?