I just spent the last two days attempting to seed our FB XL bed.
After creating sequences (get seeder, get seed, move to plant, plant seed) I decided to test out planting our first row of carrots (42).
I acquired a pack of pelleted seeds (Johnny’s - 250 count).
After a bit of dialing in of the sequences, I kicked off a test.
Results were not good. While the routine worked fine, I found the following.
1). Even with pelleted seeds, modified “get seed” routines, and a good clean vacuum system, only about 20% to 25% of the seeds made it out to the row.
2). Other than counting the seeds before and after, I have no way of knowing which plant location got a seed - no way to check if a seed was actually acquired, no way to check if the seed made it to the plant location, no way to know if the seed was actually delivered to the set depth.
3). After the first “missed seed”, the vacuum needle gets blocked with dirt during the planting portion of the sequence.
So, unless there is another method, here is my plan:
1). Run the “Move To Plant”, use a pencil to dig/mark each hole.
2). Re-run “Plant Seed”, but stop over hole, turn off vacuum. This should cause the seed to drop into each hole. A fat finger and watering should cause soil the fill the hole.
That’s a pretty clever idea (pencil, then followup). I had similar issues with the vacuum system and my solution was to have a sequence that would pick up the seeder head with the Louverlock needle on for a pointer, set a a z fly height of around -300, and have the FB visit each location pausing for 3 seconds at a time. This allowed me to plant the seed myself. While this babysitting is less than ideal, it was less time in the long run of having to reseed every few days to get the ones the FB missed due to a clogged needle, the needle picking up no seeds, or the needle picking up too many seeds.
I plan to make another version of it to make even better prep for seeding. Last weekend I managed to plant around 60 plants with relatively small amount of intervention from my side - I will share more details here when I find the time to do so. However - I recommend not to give up and say no to any manual seeding in future!
@eide
Thanks for sharing your tool/model. I will print one up today and let the kids experiment!
I set the challenge to the 6th, 7th & 8th grade students (and a few other up-and-coming 4th & 5th’ers) on how to best solve the problem (reliable, consistent automated seeding). I am hopeful they will think outside the box and come up with ideas that I (or we) have not considered.
Questions:
1). I assume you run a “Make Holes” sequence prior to seeding, then, when you run “Seeding” you just bring the seed over the hole and cut off the vacuum. The needle never comes into contact with the dirt. Correct?
2). Have you found that the “Make Holes” & “Seeding” successfully gets the seed in the hole a majority of the time?
3). Assuming good (fairly loose soil) have you found that your tool creates an adequate hole that lasts until the seeding starts? (Could be a couple hours with small plants, a big bed and multiple seeds per hole)
4). I plan on having the students do analysis on the success rate of picking up seeds. So far, my very rough findings are low, but due in large part to blockage created when FarmBot attempts to plant a seed when it failed to pick up a seed. In those cases, the needle will almost always become blocked (it is just a little dirt vacuum ). After becoming blocked, the chance of picking up seeds falls to 0%.
I think (in my humble opinion and limited FarmBot know-how (to date)), this challenge is very important. I just got done seeding our 10’ x 20’ FB XL bed yesterday with about 200 plants - manually, but using FB to move to the location for solid reference. Very time consuming…
I plan on having this task resolved and solved by the next planting season!
I managed to seed ~100 seeds with little intervention last monday. However it was a lot of trial & error to get it there. I’ll try to summarize my process, which is now almost 100% reliable in terms of seed pickup & delivery.
I plant one type of seed at a time. The sequences to achieve that are basically:
Make a hole
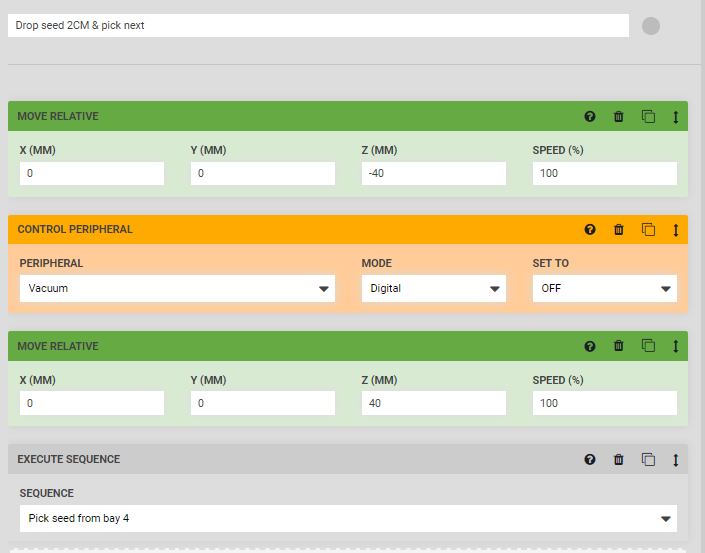
Pick seed & drop it into the hole
Cover up the hole
to be able to do this i use some farmware:
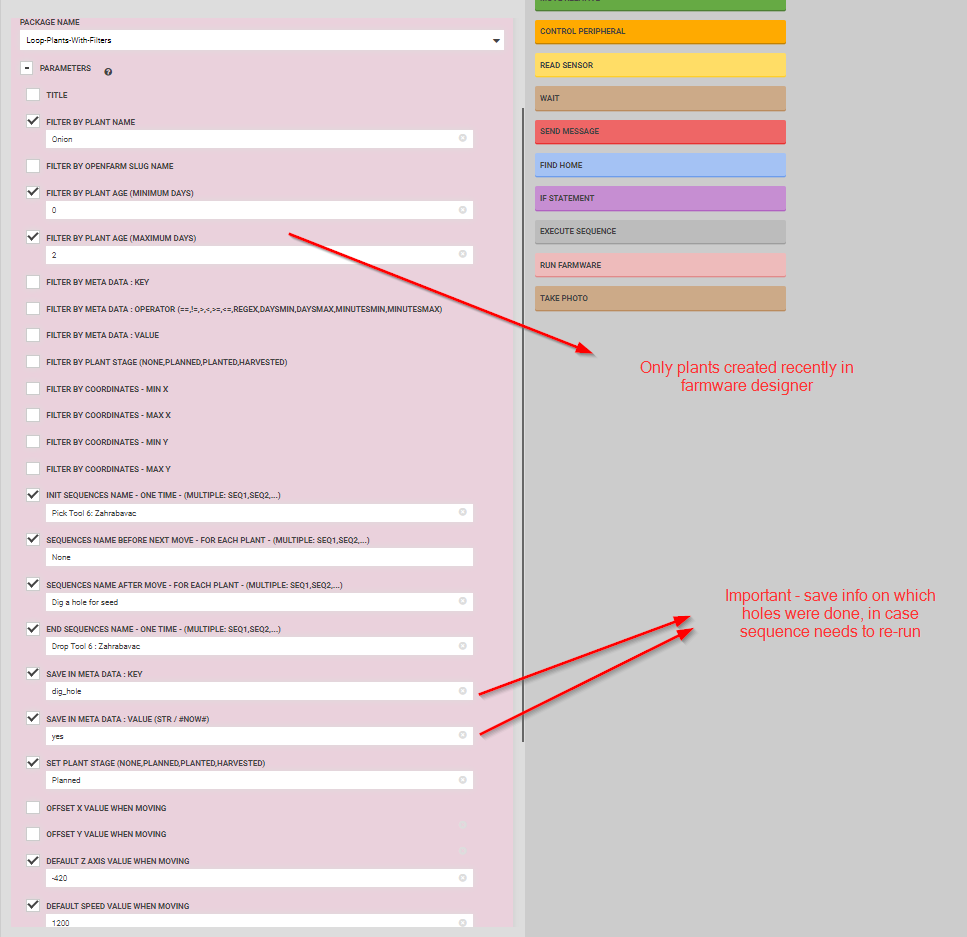
Loop-Plants-With-Filters - to execute needed sequences on the needed plants
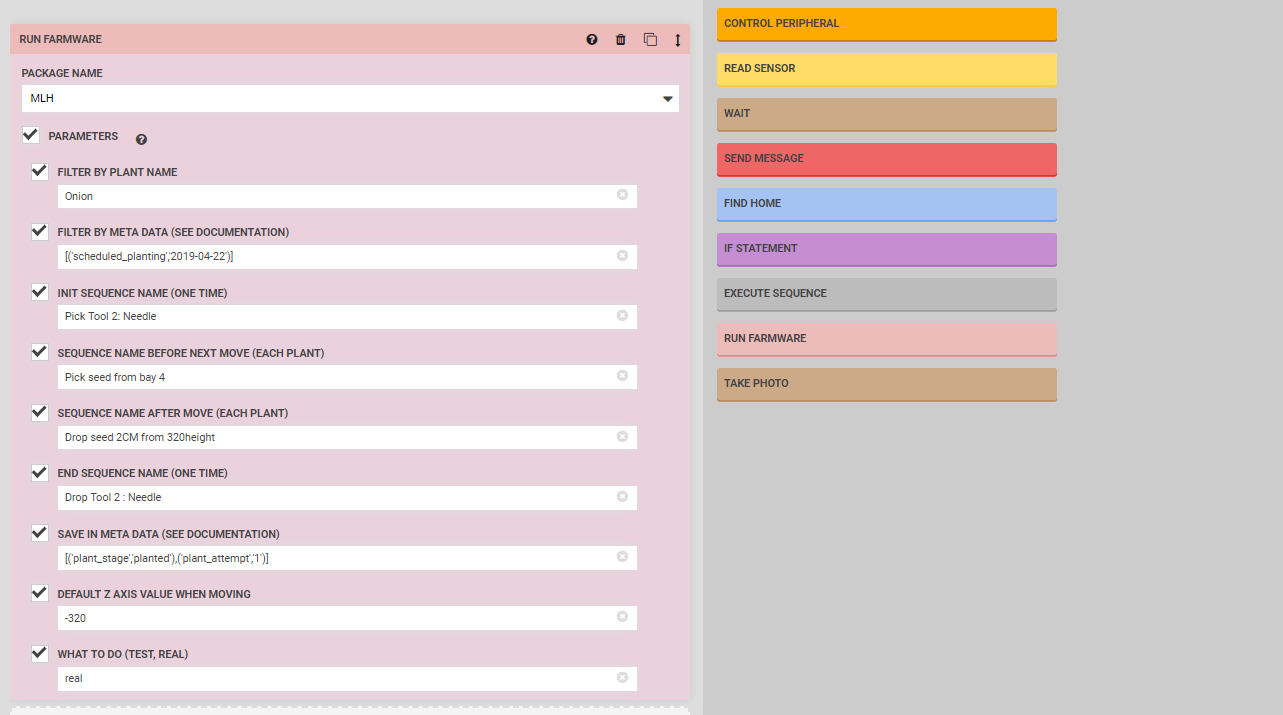
MLH - same as loop plants with filters, less complex but more buggy than the above
plants manager - mainly to manipulate metadata of the plants. (I flag all plants that should be planted today with some flag in metadata)
You should not let the needle touch the ground. Except that I would stop the needle just above the hole, switch off the vacum so that seed falls into the hole. This way it will not clog with dirt. Also make sure to select right thickness of the luer needle that corresponds with the seeds (small seed can clog wide needle)
PS: when it comes to seeding / watering, to my knowledge, farmbot does not offer a viable solution to perform these tasks. It would be good to consider adopting and maintain some farmware (e.g. MLH or loop plants with filters) until out-of-the-box farmbot software offers a satisfactory alternatives for these tools. It is simply not possible to manually type is several times coordinates of every single plant on the bed into the sequence…
Up and until now I only use the head to position for my finger to poke a hole at the exact location. The rest is manual seeding.
From my point of view seeding itself (not the hole poking process) is pretty useless to automate with farmbot because you do it only 3-4 times per season and to automate it reliably without supervision, there are many challenges to overcome. So unless your seeding would take all day because you need to work on a one square kilometer farm, this is not worth it… whereas the automated watering with the farmbot is really the only thing I am using atm automated and “useful”…
Understood, but this FarmBot is at a school.
What better opportunity and a challenge to present to the students and see how they solve it!
FarmBot seems to me, imho, a wonderful in-road to science, horticulture, robotics, coding, electrical and mechanical engineering, open-source everything and so much more, as well as having a wonderful team of developers and community forum members (You, me and all!).
We will solve the seeding thing, even if I have to have all the kids gather around the robot, watch what it does with evey seed, fix and tweak the code, re-tool the tools and bot and maybe even plant a seed or two by hand!
Wish us luck for “The Great FarmBot Planting Challenge Of 2020!”
Hi, we are wondering where the project is concerning the seeding process. We got a farmbot express so we are limited to a single combined tool. We have not found a reliable way to pick up the seeds but placing them is not perfect but seems to be a reasonable approach if you can have a propper tool.
Concerning the pickup process:
We encountered the following challenges:
the needle would not hit the lowest part of the supplied trough
when going down into the filled trough, we observed the needle pushing onto seeds and eventually spreading them by flipping the out of the container
the supplied containers are very small for a complete seeding process of an XL bed
for fix installed containers (not moving with the gantry) we had problems navigating exactly to the same location again and again.
This is why we make the bot come to a defined location and feed it manually with seeds.
Anyone has found a reliable way to pick up the seeds automatically?
placing the seeds
To place the seeds, we use the following process. It works okay and we have a success rate of 30% to 60%. We are not satisfied with the result, but with adjusted tools and more precise positioning, we are confident to increase the success rate. This is what we do:
water the positions where the seeds shall go for 500ms each
poke holes with the needle covered
release the seed above the hole and set the plant status to “planted”
run the “poke holes” sequence again to make sure the seeds are all the way down
Thanks for the feedback and sharing of your experience @jensGeorgsen. Something we plan to do to improve the seeding process is use the latest electronics boards to detect when a seed has been picked up by the needle by using load detection circuitry for the vacuum pump peripheral. The hardware for this is in place, we just need to develop the software.
To help with using fixed containers, I recommend placing them near the home (0, 0, 0) position so that the bot doesn’t have far to move from the datum of the home position hardstops.
What seeds are you using that the gantry-mounted seed troughs are not big enough for? We usually see people growing a variety of crops but not that many plants of any one type, so figured the smaller containers would be sufficient for each crop type.
Farmbot suggests using pelleted seeds. I have found the seeds need to be dry and of uniform size and shape. Obviously different size needles with different seeds and be careful not to get the seeder wet it must be dry. I think the seeder tool is something that requires a bit of maintenance over time to make sure stuff doesn’t get clogged or that water doesn’t get into the hose.
Hi @roryaronson, thanks for your suggestions. Detecting seeds is definitely an important functionality.
Concerning the suggestion with the home position: that’s a good idea but it is currently irrelevant for us as we are using an Express model where homing is not implemented yet. We miss homing and we’ll use it once it has arrived…
I think the type of seed is rather independent from the trough size question. Anyhow, we have mostly focused on palleted seeds.
About the size of the troughs
But let’s take radish as an example. We would get let’s say 20 to 50 seeds into one if we are lucky. One radish will take up 80mmx80mm on the grid. That results in 1875 plants for an XL bed (assuming 2000mm x 6000mm in size for this example).
Let’s now assume that we seed in five phases because we are well organized, that is 375 seeds per seeding session or 188 seeds per trough.
This would not fit into the troughs we have received
About the pickup process and mechanism
@whitecaps and @roryaronson: Would you mind describing how you do that (show a video, if you have)? As mentioned, we are using palleted seeds, but we still get all kinds of side effects like spreading the seeds by mechanical force to picking up in the air because there is no seed at the target destination. We did not have problems with a wet seeder or maintenance issues so far.
I am curious to hear about your experiences and suggestions.
I use normal seeds. I tried palleted seeds but I couldn’t source good quality ones, so my seeder tended to break them apart and then bits of the pallet would get stuck in the seeder. I think with better quality ones this wouldn’t happen. I stick the needle right down into all the seeds. Also with normal seeds I can fit a lot more into the seed trough. I use the big seed trough and only plant one type of plant at a time. If I plant up to 3 seeds at a time that’s all good I usually do that when I’m “manual” gardening anyway. Hope that helps.
With that method 45+ seeds using the smallest needle. But results vary depending on the seed type. If you loose vacuum power check the needle is clear, then the hose, then unscrew the pump and clean out the insides of it. I turn the vacuum on before putting the needle into the seeds. I would look into how to make the machine push a hole in the soil first. Others on the forumn have info on that. Then just drop the seed into the hole.

 ). After becoming blocked, the chance of picking up seeds falls to 0%.
). After becoming blocked, the chance of picking up seeds falls to 0%.