FarmBot Forum
Z-axis leadscrew guidance to reduce noise
Hardware
leider
September 24, 2017, 11:06am
13
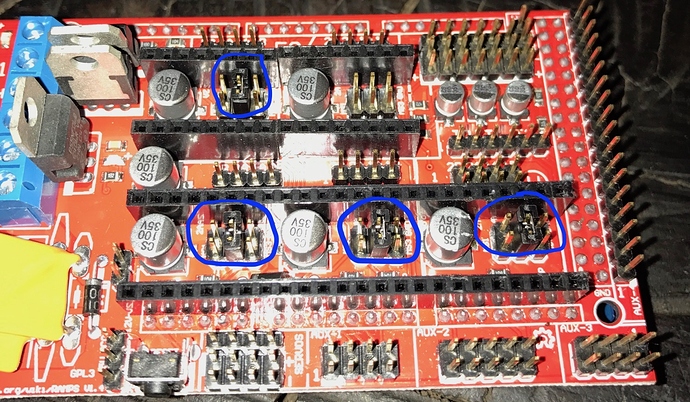
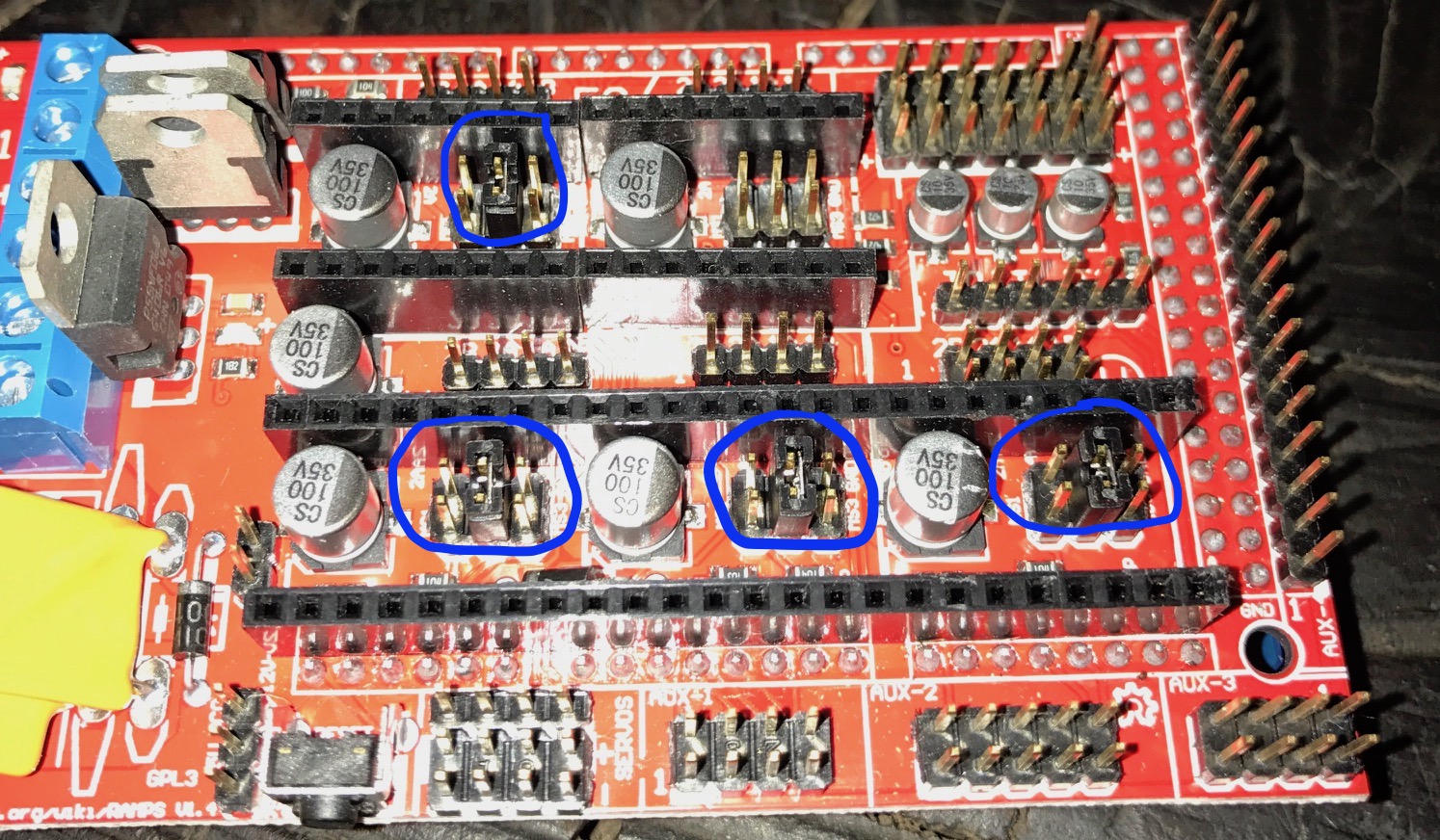
1:4 Microstepping.jpg
1494×872 517 KB
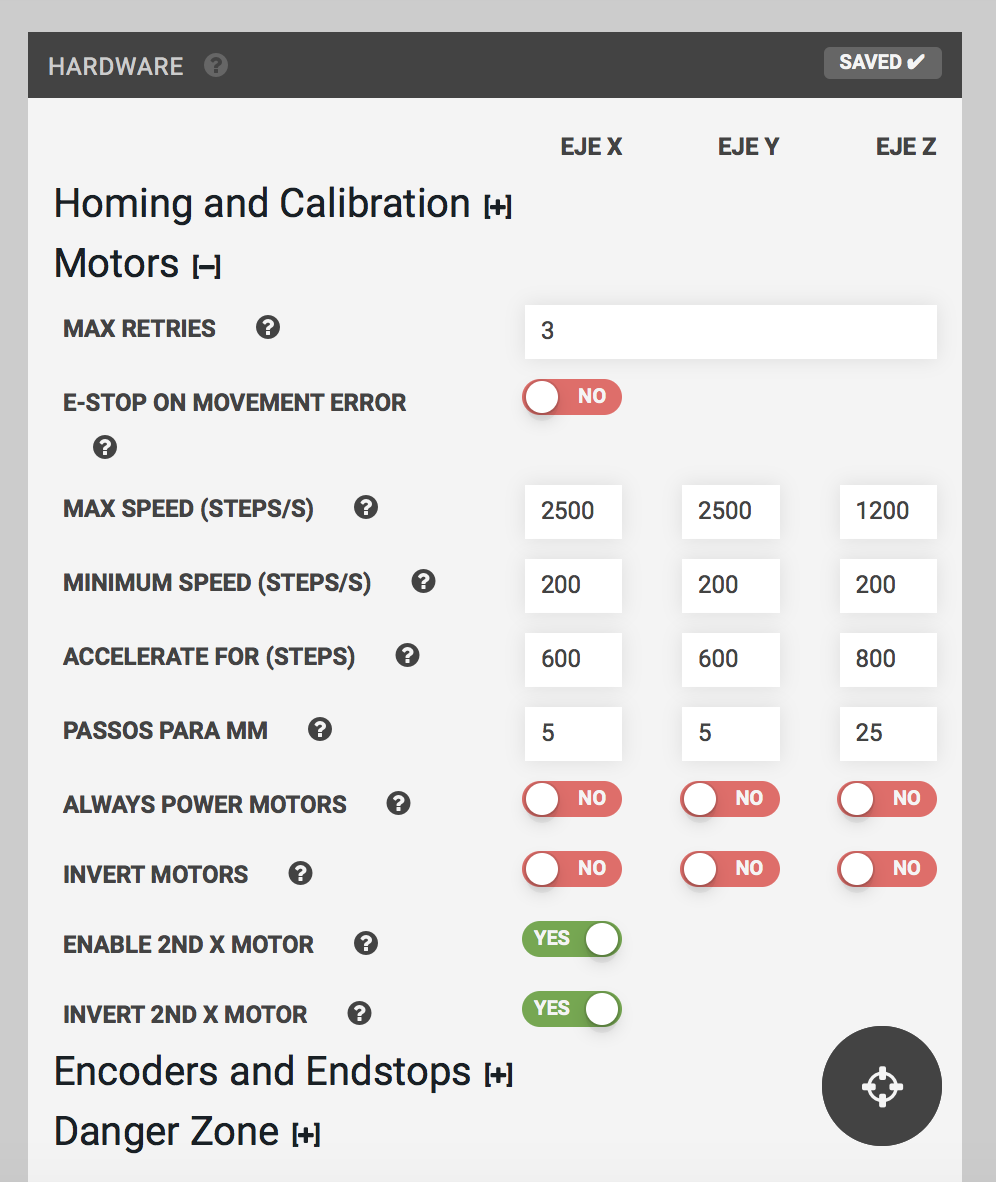
Screen.png
996×1182 83.1 KB
1 Like
Z-axis noisy when down, but not up
Better Device Settings Descriptions
show post in topic