When moving the Z-axis, noise is produced, partly by the motor, partly by friction. Our Z-axis leadscrew is not completely straight. To remedy this problem we designed and 3D-printed a construction which we mounted and the lowest possible part of the Z-axis extrusion. See picture. This reduces the noise during the up-movement. Down-movement still generates too much noise in our case (but will keep the seedloving birds away?). Any suggestions anyone?

Neat! You can try adding a stepper motor damper (such as this one), but you will need to extend the vertical motor housing to accommodate the extra height.
Thanks.
In my case I added the motor damper and it did it’s job.
Still trying to find something like @HETLABRotterdam has shown at the end of his Z-axis.
@HETLABRotterdam is there a way for you to share the 3d printed part?
We’ll buy and try a motor damper too.
Our addition is a combination of some lasercut acrylic (transparant) and a 3D-printed part (white). This first prototype is not tested extensively yet. I could send you the files: one ai-file and a stl-file to begin with?
@HETLABRotterdam STL will do 
BTW. @roryaronson is there any plan do create any database/github of custom made 3D parts?
wormwiel_print.stl (22.3 KB)
wormwielhouder (1).ai (160.0 KB)
Hope these files are of any help.
Need to modify this thing: it resonates by itself too
The best place right now to post custom part files/modifications is on the wiki. You might also consider uploading your files to a site like Thingiverse and then linking to them from a wiki page or forum post.
Understood
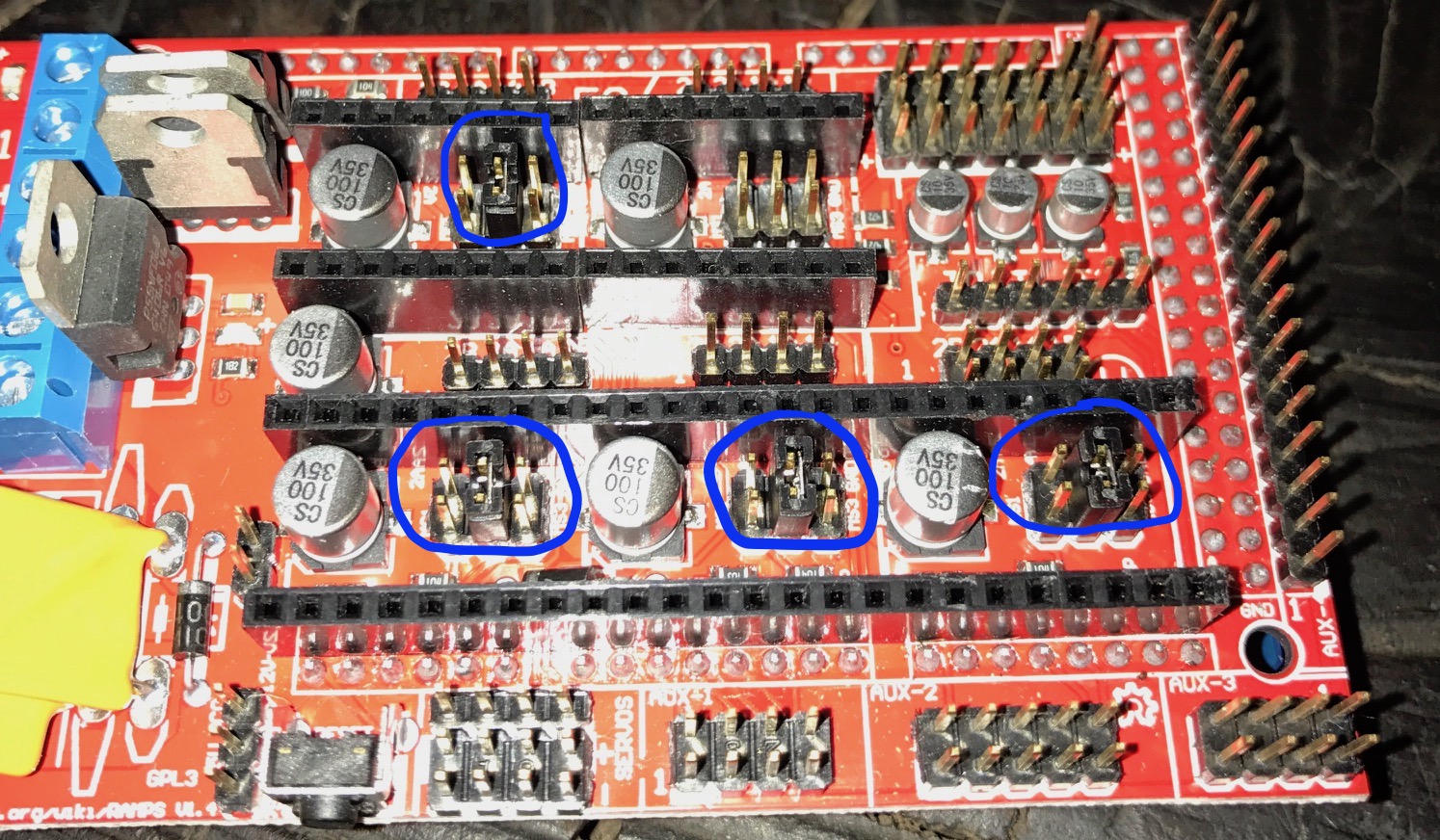
I made noise totally go away by adding 1/4 micro-stepping.
Just four jumpers and it works so much better now !
Hi @leider, can you show us what you did ?
You can find additional information about microstepping in the Software Documentations.
The calculation for the new STEPS PER MM value is documented right here.
I personally would only use microstepping for Z-axis because its the only one with loud noise.
Edit: I just activated microstepping for Z-axis with 1/4 steps at my farmbot. Maybe even 1/2 steps would be enough.
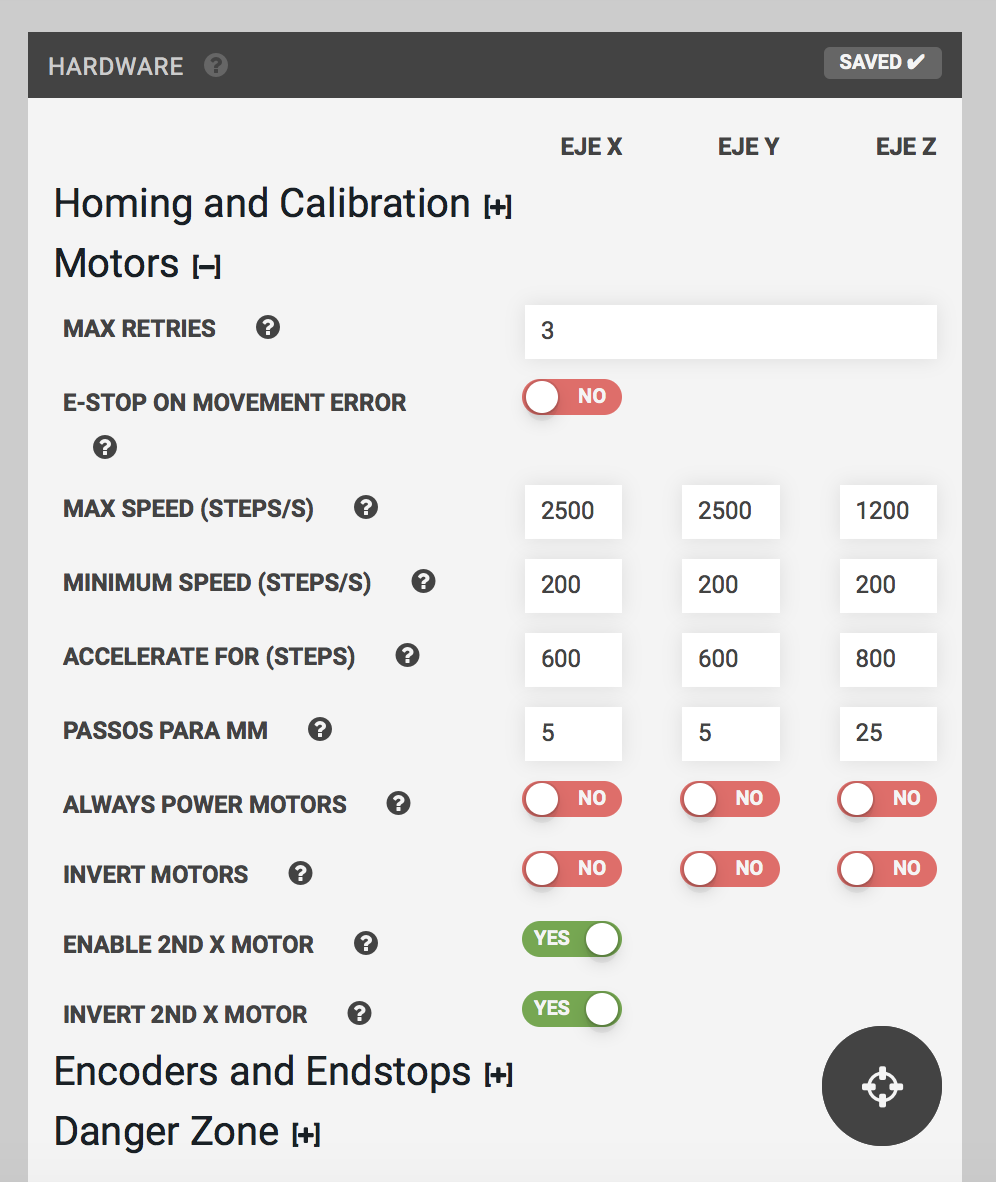
I used the following calculations (as seen in links above) to adjust the settings:
Steps per mm: 200 x 4 / 8 = 100
Encoder scaling: 100 x 200 x4 /500 = 160 <-NOTE: I’m using encoders with 500cpr. For original Farmbot use 360 instead of 500, which would make a scaling of 222.
My experience: totally worth it. Movements are much more silent and smooth.
2 Likes
A few points if you enable microstepping mode:-
- There’s a trade-off in resolution vs power, so more resolution means you get less power (torque).
- If you disable the motor (‘always power motors’ is off) then when the device is powered back on it will re-synchronise to the home position (full step position), so you will lose any microsteps that don’t coincide with the home position. This means you might get an accumulation of step errors, so just make sure you do a home sequence often (or keep motors powered).
- Obviously you need more steps to go the same distance, so the net speed will reduce. This doesn’t effect the encoder (which is the main reason speeds are what they are), so you should be able to increase the max speed to compensate.
I use 1/4 microstepping which gives me good results (but I’m using a different and more capable stepper driver).
2 Likes
These are usefull replies… We’ll try out to change the microstepping in addition to our mechanical ‘solutions’ (motor damper and guidance).
1 Like
I can admit, much better on z axis. But the values from ascend are not matching the V1.2 hardware. Please refer to the documentation of the software settings V.1.2 and ask if you have more questions!
In addition to adding dampers to the components on the plate, you can also add graphite lubricant to the Z-Axis screw.
To eliminate all or most of the Z-axis noise, this product does an excellent job. The Jig-a-loo Graphite Extreme is really great it applies easily and it is a great product. When you apply the graphite lubricant to the Z-Axis screw, extend the Z-Axis all the way down so that it is almost touching the dirt. Then liberally apply the graphite lubricant to the screw so that it appears dark grey. This will eliminate friction on the screw and significantly cut down on the noise.
It is very effective in dusty environments and in the heat.


1 Like