Hi again everyone, just following up on my post last year about my project of designing a new seed planter for FarmBot: Seeder tool redesign project.
The project wrapped up in November last year, with some aspects that worked well and some things that didn’t.
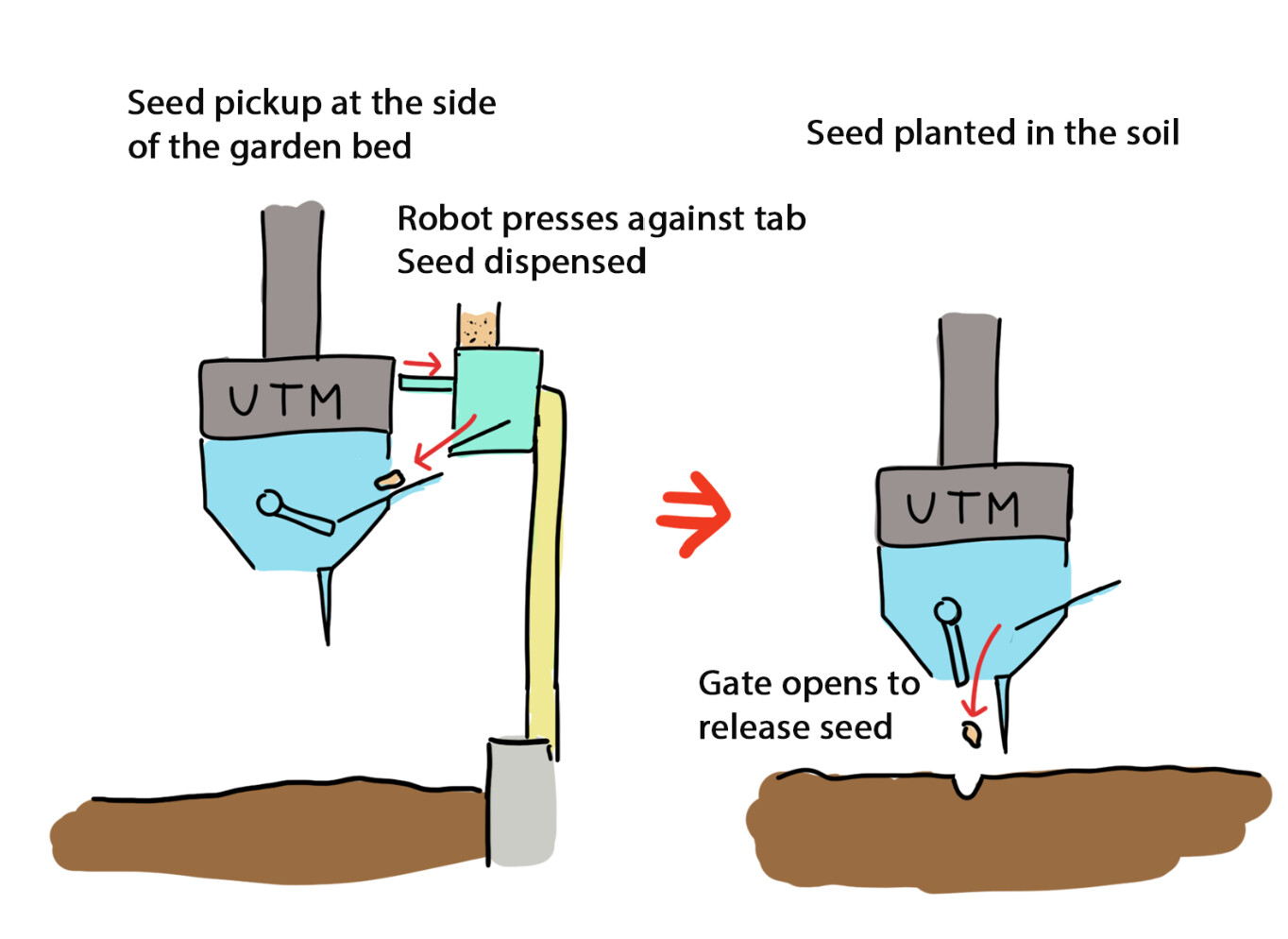
To summarise, I worked on making a seed planting system that didn’t rely on vacuum. The design comprised of two systems: a tool for the UTM for planting seeds, and another for dropping seeds into the tool.
The UTM tool worked pretty well, but the seed dispenser didn’t work as well as intended.

Below: the concept for my design.
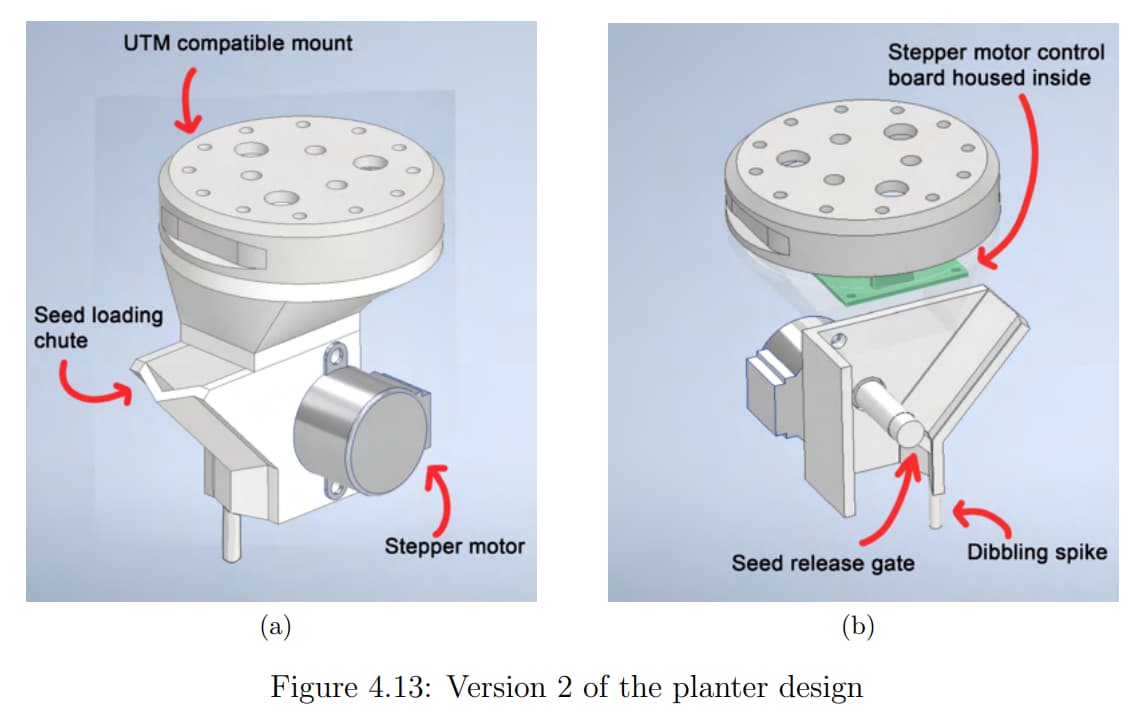
Below: the planter tool design
One of the main inspirations for the design was the Liberty University seed planter: New seeder tool design from Liberty University.
My design aimed to address what I saw as some of the shortcomings of the Liberty University concept.
For one, the tool could only plant one seed type at a time due to the seed meter in the tool. This would mean that you’d have to have several of these tools if you wanted to plant different seed varieties.
My design solves this issue by having a general-purpose tool on the UTM, and putting the seed meters off to the side of the garden, where you could have a rack of them (which would be cheaper as you don’t need multiple motors).
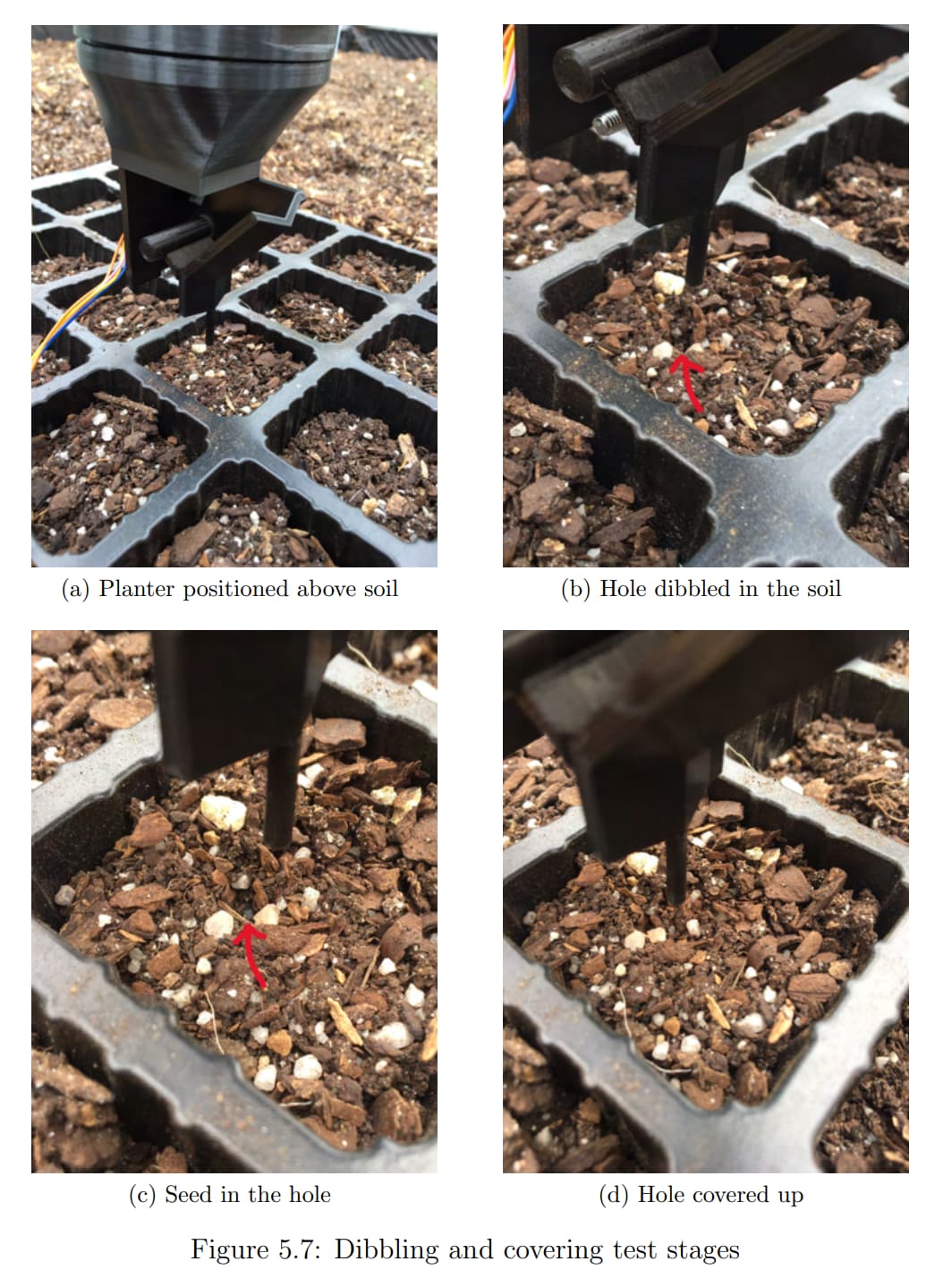
Also, in the Liberty Uni design the seeds were just dropped onto the soil, without dibbling the soil or covering the seeds up. My design has a dibbling spike on the bottom which I was able to use for both dibbling and covering the seeds.
(Image taken from my thesis, which sadly I don’t think I can include).
The design also has advantages over the vacuum needle design in that the seeds are carried more securely while the FarmBot is moving, so it doesn’t have issues with dropping the seeds in transit. Also, the design doesn’t get clogged up with dirt.
I also found that it was able to drop seeds consistently within about 2mm (96% of the time), so the planting accuracy is on par with the existing FarmBot seeder too.
I haven’t got videos of the design in action, as the uni’s FarmBot that I was using was not in great shape and I had issues getting it to follow paths consistently, and the UTM pins were acting up too, so I had to use manual controls instead and activate the stepper motor externally.
The stepper motor I used (a 28BYJ-48 motor) was also a bit weak but worked well enough once I got rid of some unnecessary friction in the gate mechanism.
Overall though, I think that this aspect of the design showed promise.
The main design problems arose from the seed dispenser system, or more specifically the seed meter for dispensing a single seed at a time into the planter tool.
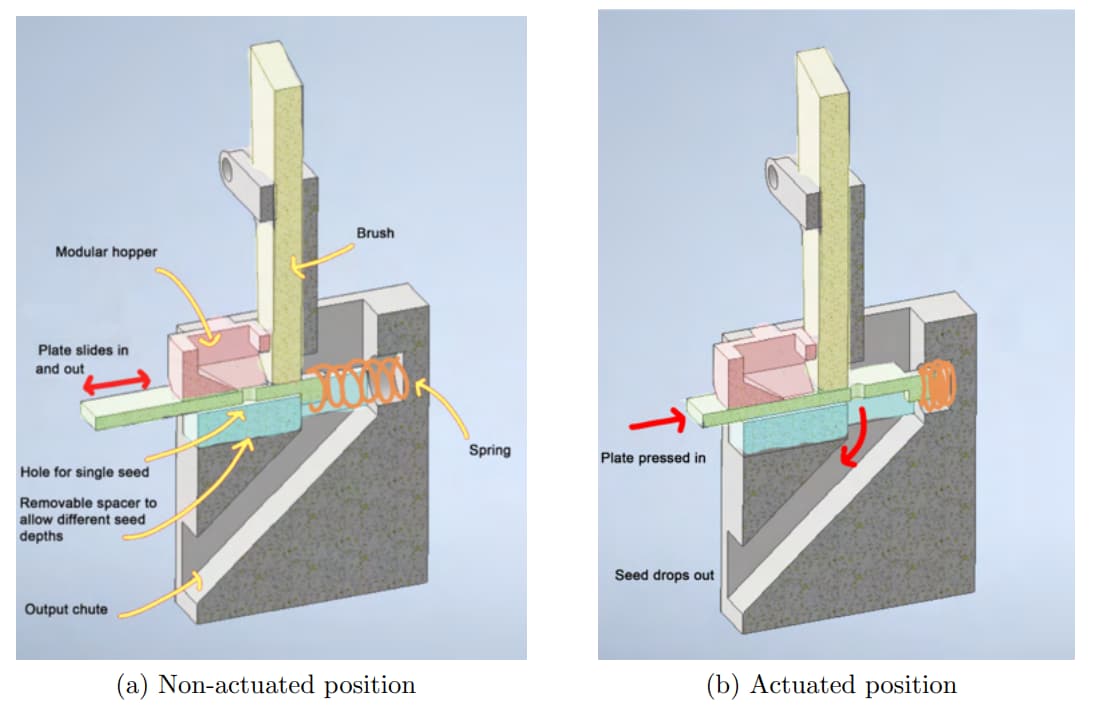
As seen in the cross-section above, the design uses a similar seed meter to the Liberty Uni design, but is linear rather than rotary, and so can be actuated by the farmbot bumping against it (in theory).
Unfortunately, I couldn’t get it to work reliably with the seeds that I had chosen, which were onion seeds. The onion seeds varied a lot in size and shape, so it was difficult to get the dimensions of the hole right to dispense one seed at a time consistently. Probably this would work better if you used coated seeds instead of uncoated.
However, the primary issue I had was the seeds in the hopper above the seed meter, which tended to kind of lock together and not naturally fall into the seed meter’s hole. Again, this would be less of an issue with seeds that were more ball-shaped.

I tried adding some corrugations to the plate of the seed meter, which helped a bit but didn’t fix the problem entirely.
In more quantitative terms, the design dispensed a single seed only 44% of the time, and either jammed, dispensed nothing, or dispensed more than one seed the other 56% of the time the system was actuated (i.e., the tab pushed in).
So in the end, the project wasn’t as successful as I’d hoped, but hopefully someone will find it useful to someone to see some of the things that worked well and things that caused issues when designing a new seed planting system.
Here are the CAD models of the parts.
Dispenser Assembly.stp (173.4 KB)
Planter Assembly.stp (2.1 MB)