Hi everyone!
I’m working on redesigning the Genesis UTM seeder tool attachment for my mechanical engineering honours project this year, with the aim of making something more reliable than the existing vacuum needle design.
I’m following on from the work of @seederproject, who for their honours project was trying to speed up the planting process by using a multi-nozzle vacuum tool. Here’s a link to their original post on this forum: Development of a new seeder attachment
During their project, they found that the existing seeder tool design had only a 33% success rate for picking up and planting onion seeds. Seeds sometimes failed to be picked up, fell off while the robot was moving, or got pushed off the needle when planting.
I’d be interested to hear if anyone has had similar issues with their seeder tools, or if anyone has had better success with their planting!
For my project, I’m thinking of moving away from a vacuum system in favour of a more mechanical solution, to avoid issues with seeds being dropped as well as soil clogging up the system. A major inspiration for the design is the Liberty University seeder tool: New seeder tool design from Liberty University
At this stage, I’m envisioning a similar gravity drop seed planting tool attached to the UTM. However, instead of having the seed meter on the planting tool, I’m thinking that it could be separated out into a separate seed dispenser, replacing the current seed trays.
Here are a few sketches:
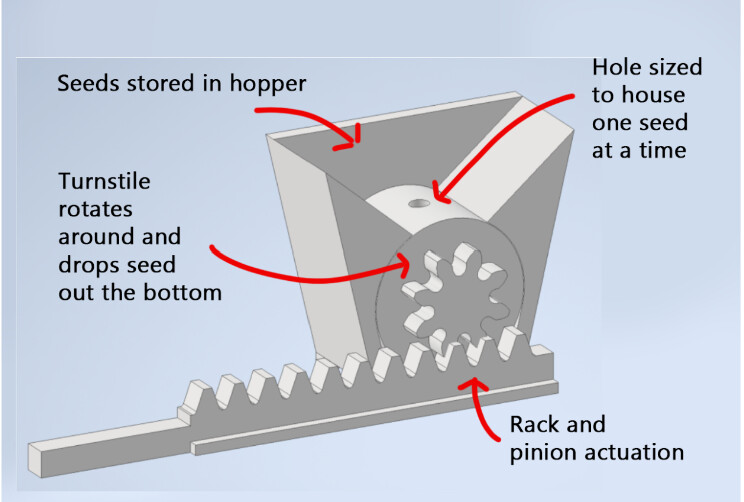
Above: the turnstile seed meter, similar to what the Liberty University guys used, for dispensing a single seed at a time.

Above: a sketch of how the seed dispenser could load seeds into the planter tool
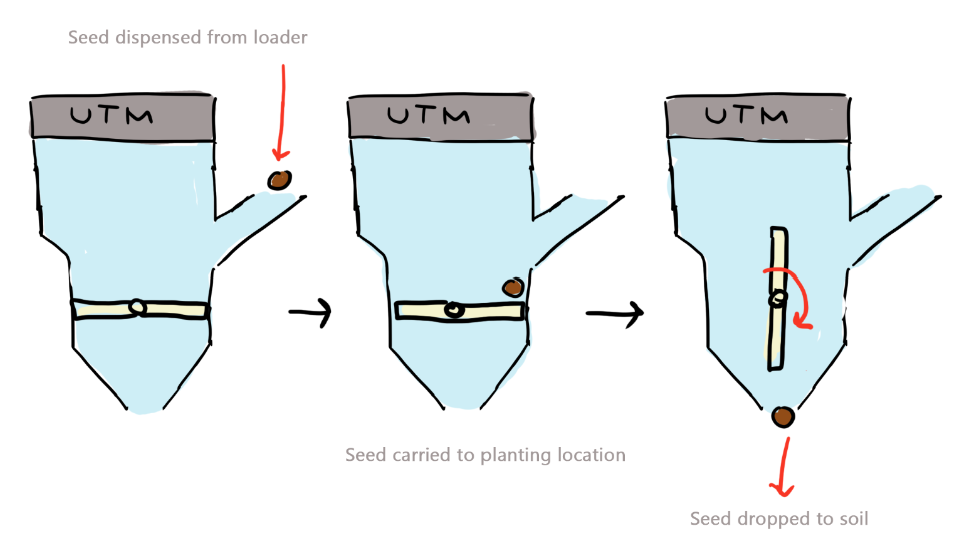
Above: a sketch of how the seed planting tool would function.
The benefit of separating the planter and the seed meter is that the planter tool could handle many different types of seeds, so you would only need one of them. You could then have an array of different seed dispensers for storing different types of seeds, each with a seed meter suited to the seed being stored.
I’ll post progress updates when I have some more to show. I’d be keen to hear what you all think!